
öĄ(sh©┤)ō■(j©┤)ĮY(ji©”)śŗ(g©░u)║═╦ŃĘ©╩ŪŽÓ▌oŽÓ│╔Ą─ĪŻöĄ(sh©┤)ō■(j©┤)ĮY(ji©”)śŗ(g©░u)╩Ū×ķ╦ŃĘ©Ę■äš(w©┤)Ą─Ż¼╦ŃĘ©ę¬ū„ė├į┌╠žČ©Ą─öĄ(sh©┤)ō■(j©┤)ĮY(ji©”)śŗ(g©░u)ų«╔ŽĪŻ ę“┤╦Ż¼╬ęéā¤o(w©▓)Ę©╣┬┴óöĄ(sh©┤)ō■(j©┤)ĮY(ji©”)śŗ(g©░u)üĒ(l©ói)ųv╦ŃĘ©Ż¼ę▓¤o(w©▓)Ę©╣┬┴ó╦ŃĘ©üĒ(l©ói)ųvöĄ(sh©┤)ō■(j©┤)ĮY(ji©”)śŗ(g©░u)ĪŻ
▒╚╚ńŻ¼ę“?y©żn)ķö?sh©┤)ĮMŠ▀ėąļSÖC(j©®)įLå¢(w©©n)Ą─╠ž³c(di©Żn)Ż¼│Żė├Ą─Č■Ęų▓ķšę╦ŃĘ©ąĶę¬ė├öĄ(sh©┤)ĮMüĒ(l©ói)┤µā”(ch©│)öĄ(sh©┤)ō■(j©┤)ĪŻĄ½╚ń╣¹╬ęéā▀xō±µ£▒Ē▀@ĘNöĄ(sh©┤)ō■(j©┤)ĮY(ji©”)śŗ(g©░u)Ż¼Č■Ęų▓ķšę╦ŃĘ©Š═¤o(w©▓)Ę©╣żū„┴╦Ż¼ę“?y©żn)ķµ£▒Ē▓ó▓╗ų¦│ųļSÖC(j©®)įLå¢(w©©n)ĪŻ
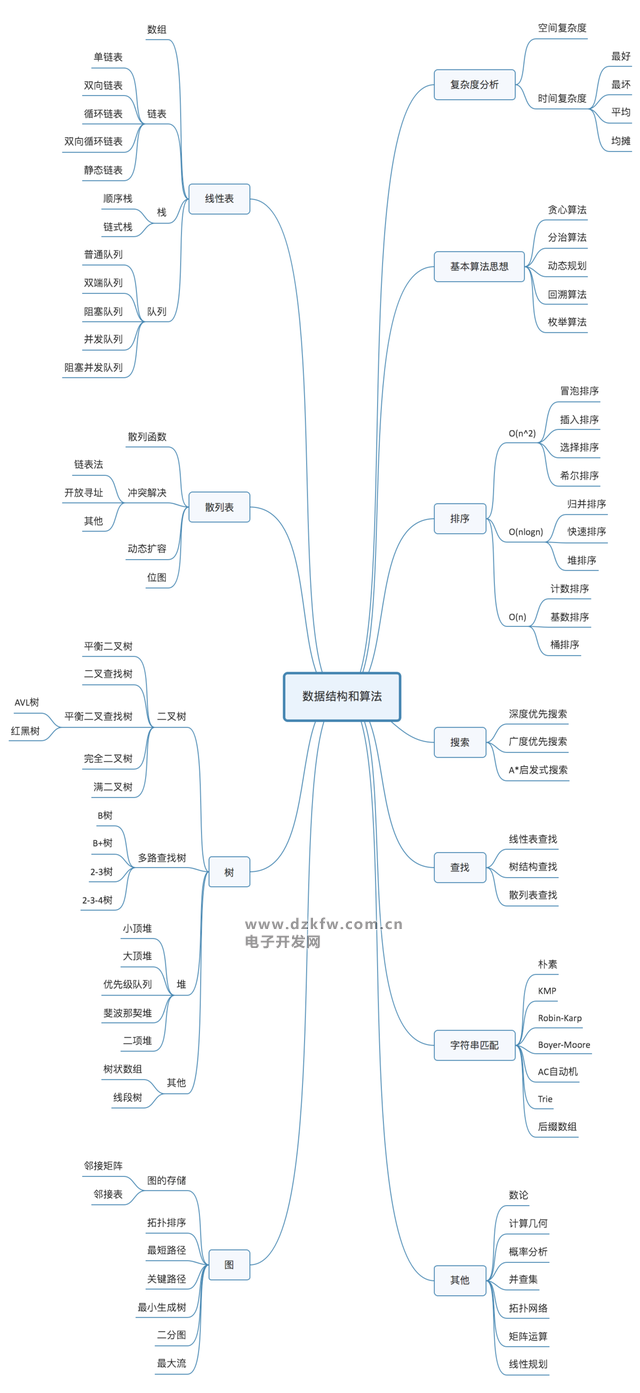
10 éĆ(g©©)öĄ(sh©┤)ō■(j©┤)ĮY(ji©”)śŗ(g©░u)Ż║öĄ(sh©┤)ĮMĪóµ£▒ĒĪóŚŻĪóĻĀ(du©¼)┴ąĪó╔ó┴ą▒ĒĪóČ■▓µśõĪóČčĪó╠°▒ĒĪółDĪóTrie śõŻ╗
10 éĆ(g©©)╦ŃĘ©Ż║▀fÜwĪó┼┼ą“ĪóČ■Ęų▓ķšęĪó╦č╦„Īó╣■ŽŻ╦ŃĘ©ĪóžØą─╦ŃĘ©ĪóĘųų╬╦ŃĘ©Īó╗ž╦▌╦ŃĘ©Īóäė(d©░ng)æB(t©żi)ęÄ(gu©®)äØĪóūųĘ¹┤«Ųź┼õ╦ŃĘ©ĪŻ
ę¬īW(xu©”)┴Ģ(x©¬)╦³Ą─Ī░üĒ(l©ói)ÜvĪ▒Ī░ūį╔ĒĄ─╠ž³c(di©Żn)Ī▒Ī░▀m║ŽĮŌøQĄ─å¢(w©©n)Ņ}Ī▒ęį╝░Ī░īŹ(sh©¬)ļHĄ─æ¬(y©®ng)ė├ł÷(ch©Żng)Š░Ī▒ĪŻ
Ū¦╚f(w©żn)▓╗ę¬▒╗äė(d©░ng)ĄžėøæøŻ¼ę¬ČÓ▐qūCĄž╦╝┐╝Ż¼ČÓå¢(w©©n)×ķ╩▓├┤ĪŻ
ę╗ą®┐╔ęįūī─Ń╩┬░ļ╣”▒ČĄ─īW(xu©”)┴Ģ(x©¬)╝╝Ū╔Ż║
-
▀ģīW(xu©”)▀ģŠÜŻ¼▀mČ╚╦óŅ}
-
ČÓå¢(w©©n)ĪóČÓ╦╝┐╝ĪóČÓ╗źäė(d©░ng)
-
-
ų¬ūR(sh©¬)ąĶę¬│┴ĄĒŻ¼▓╗ꬎļįćłDę╗Ž┬ūėšŲ╬š╦∙ėą
īW(xu©”)┴Ģ(x©¬)Ą─▀^(gu©░)│╠ųąŻ¼╬ęéā┼÷ĄĮūŅ┤¾Ą─å¢(w©©n)Ņ}Š═╩ŪŻ¼łį(ji©Īn)│ų▓╗Ž┬üĒ(l©ói)ĪŻ
╬ęéā?c©©)┌┐▌į’Ą─īW(xu©”)┴Ģ(x©¬)▀^(gu©░)│╠ųąŻ¼ę▓┐╔ęįĮoūį╝║įO(sh©©)┴óę╗éĆ(g©©)ŪąīŹ(sh©¬)┐╔ąąĄ──┐ś╦(bi©Īo)Ż¼Š═Ž±┤“╣ų╔²╝ē(j©¬)ę╗śėĪŻ
1ĪóöĄ(sh©┤)ĮM

2Īóµ£▒Ē
ŠÅ┤µĄ─┤¾ąĪėąŽ▐Ż¼«ö(d©Īng)ŠÅ┤µ▒╗ė├ØMĢr(sh©¬)Ż¼──ą®öĄ(sh©┤)ō■(j©┤)æ¬(y©®ng)įō▒╗ŪÕ└Ē│÷╚źŻ¼──ą®öĄ(sh©┤)ō■(j©┤)æ¬(y©®ng)įō▒╗▒Ż┴¶Ż┐▀@Š═ąĶꬊÅ┤µ╠į╠Ł▓▀┬įüĒ(l©ói)øQČ©ĪŻ│ŻęŖĄ─▓▀┬įėą╚²ĘNŻ║Ž╚▀M(j©¼n)Ž╚│÷▓▀┬į FIFOŻ©First InŻ¼F(xi©żn)irst OutŻ®ĪóūŅ╔┘╩╣ė├▓▀┬į LFUŻ©Least Frequently UsedŻ®ĪóūŅĮ³ūŅ╔┘╩╣ė├▓▀┬į LRUŻ©Least Recently UsedŻ®ĪŻ
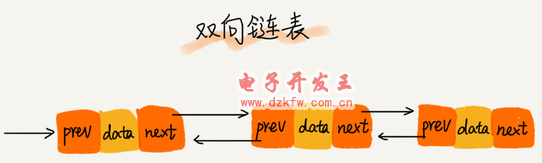
╚²ĘNūŅ│ŻęŖĄ─µ£▒ĒĮY(ji©”)śŗ(g©░u)Ż¼╦³éāĘųäe╩ŪŻ║å╬µ£▒ĒĪóļpŽ“µ£▒Ē║═裣h(hu©ón)µ£▒ĒĪŻ
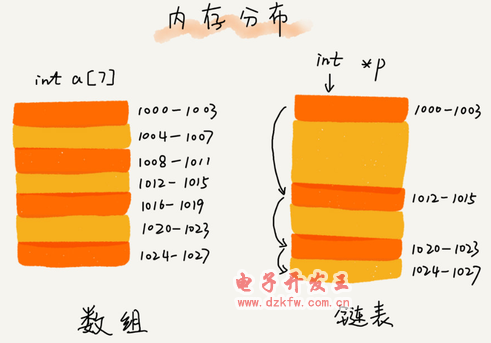
Ż©1Ż®å╬µ£▒Ē
µ£▒Ē═©▀^(gu©░)ųĖßśīóę╗ĮM┴Ń╔óĄ─ā╚(n©©i)┤µēK┤«┬ō(li©ón)į┌ę╗ŲĪŻŲõųąŻ¼╬ęéā░čā╚(n©©i)┤µēKĘQ×ķµ£▒ĒĄ─Ī░ĮY(ji©”)³c(di©Żn)Ī▒ĪŻ×ķ┴╦īó╦∙ėąĄ─╣Ø(ji©”)³c(di©Żn)┤«ŲüĒ(l©ói)Ż¼├┐éĆ(g©©)µ£▒ĒĄ─ĮY(ji©”)³c(di©Żn)│²┴╦┤µā”(ch©│)öĄ(sh©┤)ō■(j©┤)ų«═ŌŻ¼▀ĆąĶę¬ėøõøµ£╔ŽĄ─Ž┬ę╗éĆ(g©©)╣Ø(ji©”)³c(di©Żn)Ą─ĄžųĘĪŻ╚ńłD╦∙╩ŠŻ¼╬ęéā░č▀@éĆ(g©©)ėøõøŽ┬éĆ(g©©)ĮY(ji©”)³c(di©Żn)ĄžųĘĄ─ųĖßśĮąū„║¾└^ųĖßś nextĪŻ

Å─╬ę«ŗĄ─å╬µ£▒ĒłDųąŻ¼─Ńæ¬(y©®ng)įō┐╔ęį░l(f©Ī)¼F(xi©żn)Ż¼Ųõųąėąā╔éĆ(g©©)ĮY(ji©”)³c(di©Żn)╩Ū▒╚▌^╠ž╩ŌĄ─Ż¼╦³éāĘųäe╩ŪĄ┌ę╗éĆ(g©©)ĮY(ji©”)³c(di©Żn)║═ūŅ║¾ę╗éĆ(g©©)ĮY(ji©”)³c(di©Żn)ĪŻ╬ęéā┴Ģ(x©¬)æTąįĄž░čĄ┌ę╗éĆ(g©©)ĮY(ji©”)³c(di©Żn)Įąū„Ņ^ĮY(ji©”)³c(di©Żn)Ż¼░čūŅ║¾ę╗éĆ(g©©)ĮY(ji©”)³c(di©Żn)Įąū„╬▓ĮY(ji©”)³c(di©Żn)ĪŻŲõųąŻ¼Ņ^ĮY(ji©”)³c(di©Żn)ė├üĒ(l©ói)ėøõøµ£▒ĒĄ─╗∙ĄžųĘĪŻėą┴╦╦³Ż¼╬ęéāŠ═┐╔ęį▒ķÜvĄ├ĄĮš¹Ślµ£▒ĒĪŻČ°╬▓ĮY(ji©”)³c(di©Żn)╠ž╩ŌĄ─ĄžĘĮ╩ŪŻ║ųĖßś▓╗╩ŪųĖŽ“Ž┬ę╗éĆ(g©©)╣Ø(ji©”)³c(di©Żn)Ż¼Č°╩ŪųĖŽ“ę╗éĆ(g©©)┐šĄžųĘ NULLŻ¼▒Ē╩Š▀@╩Ūµ£▒Ē╔ŽūŅ║¾ę╗éĆ(g©©)╣Ø(ji©”)³c(di©Żn)ĪŻ
Ż©2Ż®čŁŁh(hu©ón)µ£▒Ē
«ö(d©Īng)ę¬╠Ä└ĒĄ─öĄ(sh©┤)ō■(j©┤)Š▀ėąŁh(hu©ón)ą═ĮY(ji©”)śŗ(g©░u)╠ž³c(di©Żn)Ģr(sh©¬)Ż¼Š═╠žäe▀m║Ž▓╔ė├裣h(hu©ón)µ£▒ĒĪŻ▒╚╚ńų°├¹Ą─╝s╔¬Ę“å¢(w©©n)Ņ}ĪŻ
Ż©3Ż®ļpŽ“µ£▒Ē
ļpŽ“µ£▒ĒąĶę¬Ņ~═ŌĄ─ā╔éĆ(g©©)┐šķgüĒ(l©ói)┤µā”(ch©│)║¾└^ĮY(ji©”)³c(di©Żn)║═Ū░“ī(q©▒)ĮY(ji©”)³c(di©Żn)Ą─ĄžųĘĪŻ╦∙ęįŻ¼╚ń╣¹┤µā”(ch©│)═¼śėČÓĄ─öĄ(sh©┤)ō■(j©┤)Ż¼ļpŽ“µ£▒Ēę¬▒╚å╬µ£▒Ēš╝ė├Ė³ČÓĄ─ā╚(n©©i)┤µ┐šķgĪŻļm╚╗ā╔éĆ(g©©)ųĖßś▒╚▌^└╦┘M(f©©i)┤µā”(ch©│)┐šķgŻ¼Ą½┐╔ęįų¦│ųļpŽ“▒ķÜvŻ¼▀@śėę▓ĦüĒ(l©ói)┴╦ļpŽ“µ£▒Ē▓┘ū„Ą─ņ`╗ŅąįĪŻ
ļpŽ“µ£▒Ē┐╔ęįų¦│ų O(1) Ģr(sh©¬)ķgÅ═(f©┤)ļsČ╚Ą─ŪķørŽ┬šęĄĮŪ░“ī(q©▒)ĮY(ji©”)³c(di©Żn)ĪŻ

╦∙ęįöĄ(sh©┤)ĮM▀m║Žū÷▓ķįāŻ¼▒╚╚ń▓ķįā╦ŃĘ©Č╝╩Ūė├öĄ(sh©┤)ĮMŻ¼µ£▒Ē▀m║Žū÷ā”(ch©│)┤µŻ¼▒╚╚ńlruĢ■(hu©¼)┐╝æ]µ£▒ĒĪŻ
╚ń║╬▌p╦╔īæ│÷š²┤_Ą─µ£▒Ē┤·┤aŻ┐
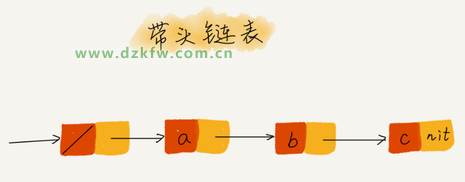
▀ĆėøĄ├╚ń║╬▒Ē╩Šę╗éĆ(g©©)┐šµ£▒Ēå߯┐head=null ▒Ē╩Šµ£▒Ēųąø](m©”i)ėąĮY(ji©”)³c(di©Żn)┴╦ĪŻŲõųą head ▒Ē╩ŠŅ^ĮY(ji©”)³c(di©Żn)ųĖßśŻ¼ųĖŽ“µ£▒ĒųąĄ─Ą┌ę╗éĆ(g©©)╣Ø(ji©”)³c(di©Żn)ĪŻ
╚ń╣¹╬ęéāę²╚ļ╔┌▒°ĮY(ji©”)³c(di©Żn)Ż¼į┌╚╬║╬Ģr(sh©¬)║“Ż¼▓╗╣▄µ£▒Ē╩Ū▓╗╩Ū┐šŻ¼head ųĖßśČ╝Ģ■(hu©¼)ę╗ų▒ųĖŽ“▀@éĆ(g©©)╔┌▒°ĮY(ji©”)³c(di©Żn)ĪŻ╬ęéāę▓░č▀@ĘNėą╔┌▒°ĮY(ji©”)³c(di©Żn)Ą─µ£▒ĒĮąÄ¦Ņ^µ£▒ĒĪŻŽÓĘ┤Ż¼ø](m©”i)ėą╔┌▒°ĮY(ji©”)³c(di©Żn)Ą─µ£▒ĒŠ═Įąū„▓╗ĦŅ^µ£▒ĒĪŻ
╔┌▒°ĮY(ji©”)³c(di©Żn)╩Ū▓╗┤µā”(ch©│)öĄ(sh©┤)ō■(j©┤)Ą─ĪŻę“?y©żn)ķ╔┌▒°ĮY(ji©”)³c(di©Żn)ę╗ų▒┤µį┌Ż¼╦∙ęį▓Õ╚ļĄ┌ę╗éĆ(g©©)ĮY(ji©”)³c(di©Żn)║═▓Õ╚ļŲõ╦¹ĮY(ji©”)³c(di©Żn)Ż¼äh│²ūŅ║¾ę╗éĆ(g©©)╣Ø(ji©”)³c(di©Żn)║═äh│²Ųõ╦¹ĮY(ji©”)³c(di©Żn)Ż¼Č╝┐╔ęįĮy(t©»ng)ę╗×ķŽÓ═¼Ą─┤·┤aīŹ(sh©¬)¼F(xi©żn)▀ē▌ŗ┴╦ĪŻ
3ĪóŚŻ
«ö(d©Īng)─│éĆ(g©©)öĄ(sh©┤)ō■(j©┤)╝»║Žų╗╔µ╝░į┌ę╗Č╦▓Õ╚ļ║═äh│²öĄ(sh©┤)ō■(j©┤)Ż¼▓óŪęØMūŃ║¾▀M(j©¼n)Ž╚│÷ĪóŽ╚▀M(j©¼n)║¾│÷Ą─╠žąįŻ¼╬ęéāŠ═æ¬(y©®ng)įō╩ū▀xĪ░ŚŻĪ▒▀@ĘNöĄ(sh©┤)ō■(j©┤)ĮY(ji©”)śŗ(g©░u)ĪŻ
▒╚▌^Įø(j©®ng)ĄõĄ─ę╗éĆ(g©©)æ¬(y©®ng)ė├ł÷(ch©Żng)Š░Š═╩Ū1Īó ║»öĄ(sh©┤)š{(di©żo)ė├ŚŻ.2ĪóŚŻį┌▒Ē▀_(d©ó)╩ĮŪ¾ųĄųąĄ─æ¬(y©®ng)ė├3ĪóŚŻį┌└©╠¢(h©żo)Ųź┼õųąĄ─æ¬(y©®ng)ė├
leetcode╔ŽĻP(gu©Īn)ė┌ŚŻĄ─Ņ}─┐┤¾╝ę┐╔ęįŽ╚ū÷20,155,232,844,224,682,496.
4ĪóĻĀ(du©¼)┴ą
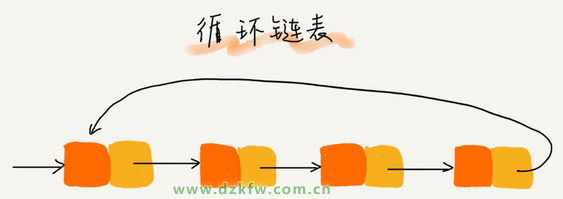
裣h(hu©ón)ĻĀ(du©¼)┴ą
裣h(hu©ón)ĻĀ(du©¼)┴ąŻ¼ŅÖ├¹╦╝┴xŻ¼╦³ķL(zh©Żng)Ą├Ž±ę╗éĆ(g©©)Łh(hu©ón)ĪŻįŁ▒ŠöĄ(sh©┤)ĮM╩ŪėąŅ^ėą╬▓Ą─Ż¼╩Ūę╗Ślų▒ŠĆĪŻ¼F(xi©żn)į┌╬ęéā░č╩ū╬▓ŽÓ▀BŻ¼░Ō│╔┴╦ę╗éĆ(g©©)Łh(hu©ón)ĪŻ
ūĶ╚¹ĻĀ(du©¼)┴ą
ūĶ╚¹ĻĀ(du©¼)┴ąŲõīŹ(sh©¬)Š═╩Ūį┌ĻĀ(du©¼)┴ą╗∙ĄA(ch©│)╔Žį÷╝ė┴╦ūĶ╚¹▓┘ū„ĪŻ║å(ji©Żn)å╬üĒ(l©ói)šf(shu©Ł)Ż¼Š═╩Ūį┌ĻĀ(du©¼)┴ą×ķ┐šĄ─Ģr(sh©¬)║“Ż¼Å─ĻĀ(du©¼)Ņ^╚ĪöĄ(sh©┤)ō■(j©┤)Ģ■(hu©¼)▒╗ūĶ╚¹ĪŻę“?y©żn)ķ┤╦Ģr(sh©¬)▀Ćø](m©”i)ėąöĄ(sh©┤)ō■(j©┤)┐╔╚ĪŻ¼ų▒ĄĮĻĀ(du©¼)┴ąųąėą┴╦öĄ(sh©┤)ō■(j©┤)▓┼─▄ĘĄ╗žŻ╗╚ń╣¹ĻĀ(du©¼)┴ąęčĮø(j©®ng)ØM┴╦Ż¼─Ū├┤▓Õ╚ļöĄ(sh©┤)ō■(j©┤)Ą─▓┘ū„Š═Ģ■(hu©¼)▒╗ūĶ╚¹Ż¼ų▒ĄĮĻĀ(du©¼)┴ąųąėą┐šķe╬╗ų├║¾į┘▓Õ╚ļöĄ(sh©┤)ō■(j©┤)Ż¼╚╗║¾į┘ĘĄ╗žĪŻ
▓ó░l(f©Ī)ĻĀ(du©¼)┴ą
ŠĆ│╠░▓╚½Ą─ĻĀ(du©¼)┴ą╬ęéāĮąū„▓ó░l(f©Ī)ĻĀ(du©¼)┴ąĪŻūŅ║å(ji©Żn)å╬ų▒ĮėĄ─īŹ(sh©¬)¼F(xi©żn)ĘĮ╩Į╩Ūų▒Įėį┌ enqueue()Īódequeue() ĘĮĘ©╔Ž╝ėµiŻ¼Ą½╩Ūµi┴ŻČ╚┤¾▓ó░l(f©Ī)Č╚Ģ■(hu©¼)▒╚▌^Ą═Ż¼═¼ę╗Ģr(sh©¬)┐╠āHį╩įSę╗éĆ(g©©)┤µ╗“š▀╚Ī▓┘ū„ĪŻ
5Īó╠°▒Ē

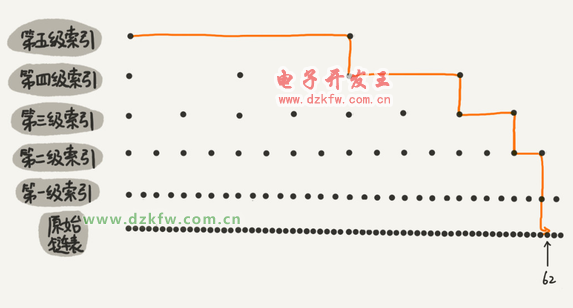
▀@ĘNµ£▒Ē╝ėČÓ╝ē(j©¬)╦„ę²Ą─ĮY(ji©”)śŗ(g©░u)Ż¼Š═╩Ū╠°▒ĒĪŻ
ė├╠°▒Ē▓ķįāĄĮĄūėąČÓ┐ņŻ┐
Ą┌ k ╝ē(j©¬)╦„ę²Ą─ĮY(ji©”)³c(di©Żn)éĆ(g©©)öĄ(sh©┤)╩ŪĄ┌ k-1 ╝ē(j©¬)╦„ę²Ą─ĮY(ji©”)³c(di©Żn)éĆ(g©©)öĄ(sh©┤)Ą─ 1/2Ż¼─ŪĄ┌ k╝ē(j©¬)╦„ę²ĮY(ji©”)³c(di©Żn)Ą─éĆ(g©©)öĄ(sh©┤)Š═╩Ū n/(2k)ĪŻ
Ģr(sh©¬)ķgÅ═(f©┤)ļsČ╚Ż║ O(m*logn)ĪŻ
╠°▒Ē╩Ū▓╗╩Ū║▄└╦┘M(f©©i)ā╚(n©©i)┤µŻ┐
╠°▒ĒąĶę¬┤µā”(ch©│)ČÓ╝ē(j©¬)╦„ę²Ż¼┐ŽČ©ę¬Ž¹║─Ė³ČÓĄ─┤µā”(ch©│)┐šķgĪŻ
╠°▒ĒĄ─┐šķgÅ═(f©┤)ļsČ╚╩Ū O(n)ĪŻ
×ķ╩▓├┤ Redis ę¬ė├╠°▒ĒüĒ(l©ói)īŹ(sh©¬)¼F(xi©żn)ėąą“╝»║ŽŻ¼Č°▓╗╩Ū╝t║┌śõŻ┐
Redis ųąĄ─ėąą“╝»║Žų¦│ųĄ─║╦ą─▓┘ū„ų„ę¬ėąŽ┬├µ▀@ÄūéĆ(g©©)Ż║
-
▓Õ╚ļę╗éĆ(g©©)öĄ(sh©┤)ō■(j©┤)Ż╗
-
äh│²ę╗éĆ(g©©)öĄ(sh©┤)ō■(j©┤)Ż╗
-
▓ķšęę╗éĆ(g©©)öĄ(sh©┤)ō■(j©┤)Ż╗
-
░┤ššģ^(q©▒)ķg▓ķšęöĄ(sh©┤)ō■(j©┤)Ż©▒╚╚ń▓ķšęųĄį┌ [100, 356] ų«ķgĄ─öĄ(sh©┤)ō■(j©┤)Ż®Ż╗
-
Ą³┤·▌ö│÷ėąą“ą“┴ąĪŻ
ŲõųąŻ¼▓Õ╚ļĪóäh│²Īó▓ķšęęį╝░Ą³┤·▌ö│÷ėąą“ą“┴ą▀@ÄūéĆ(g©©)▓┘ū„Ż¼╝t║┌śõę▓┐╔ęį═Ļ│╔Ż¼Ģr(sh©¬)ķgÅ═(f©┤)ļsČ╚Ė·╠°▒Ē╩Ūę╗śėĄ─ĪŻĄ½╩ŪŻ¼░┤ššģ^(q©▒)ķgüĒ(l©ói)▓ķšęöĄ(sh©┤)ō■(j©┤)▀@éĆ(g©©)▓┘ū„Ż¼╝t║┌śõĄ─ą¦┬╩ø](m©”i)ėą╠°▒ĒĖ▀ĪŻ
ī”(du©¼)ė┌░┤ššģ^(q©▒)ķg▓ķšęöĄ(sh©┤)ō■(j©┤)▀@éĆ(g©©)▓┘ū„Ż¼╠°▒Ē┐╔ęįū÷ĄĮ O(logn) Ą─Ģr(sh©¬)ķgÅ═(f©┤)ļsČ╚Č©╬╗ģ^(q©▒)ķgĄ─Ų³c(di©Żn)Ż¼╚╗║¾į┌įŁ╩╝µ£▒ĒųąĒśą“═∙║¾▒ķÜvŠ═┐╔ęį┴╦ĪŻ▀@śėū÷ĘŪ│ŻĖ▀ą¦ĪŻ
▀ĆėąŻ¼╠°▒ĒĖ³╝ėņ`╗ŅŻ¼╦³┐╔ęį═©▀^(gu©░)Ė─ūā╦„ę²śŗ(g©░u)Į©▓▀┬įŻ¼ėąą¦ŲĮ║Ōł╠(zh©¬)ąąą¦┬╩║═ā╚(n©©i)┤µŽ¹║─ĪŻ
6ĪóČ■▓µśõ
7ĪóTrieśõŻ©ūųĄõśõŻ®
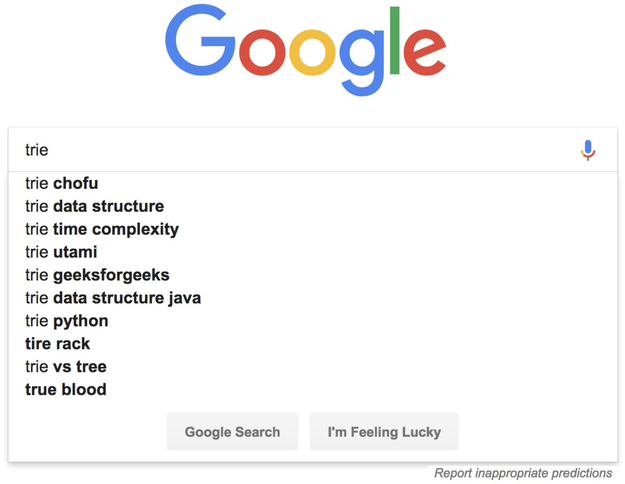
Trie śõŻ¼ę▓ĮąĪ░ūųĄõśõĪ▒ĪŻŅÖ├¹╦╝┴xŻ¼╦³╩Ūę╗éĆ(g©©)śõą╬ĮY(ji©”)śŗ(g©░u)ĪŻ╦³╩Ūę╗ĘNīŻķT╠Ä└ĒūųĘ¹┤«Ųź┼õĄ─öĄ(sh©┤)ō■(j©┤)ĮY(ji©”)śŗ(g©░u)Ż¼ė├üĒ(l©ói)ĮŌøQį┌ę╗ĮMūųĘ¹┤«╝»║Žųą┐ņ╦┘▓ķšę─│éĆ(g©©)ūųĘ¹┤«Ą─å¢(w©©n)Ņ}ĪŻ
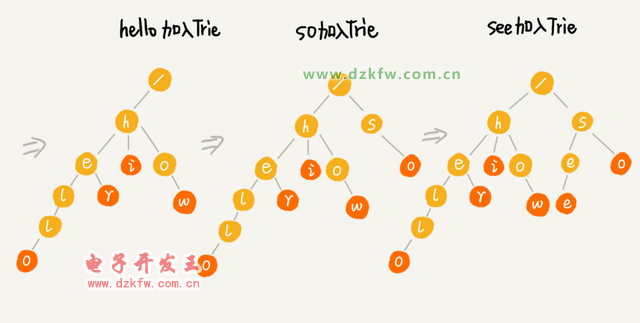
Trie śõų„ę¬ėąā╔éĆ(g©©)▓┘ū„
-
ę╗éĆ(g©©)╩ŪīóūųĘ¹┤«╝»║Žśŗ(g©░u)įņ│╔ Trie śõŻ¼Š═╩Ūę╗éĆ(g©©)īóūųĘ¹┤«▓Õ╚ļĄĮ Trie śõĄ─▀^(gu©░)│╠ĪŻ
-
┴Ēę╗éĆ(g©©)╩Ūį┌ Trie śõųą▓ķįāę╗éĆ(g©©)ūųĘ¹┤«ĪŻ
Trie śõĄ─ūā¾wėą║▄ČÓŻ¼Č╝┐╔ęįį┌ę╗Č©│╠Č╚╔ŽĮŌøQā╚(n©©i)┤µŽ¹║─Ą─å¢(w©©n)Ņ}ĪŻ▒╚╚ńŻ¼┐s³c(di©Żn)ā×(y©Łu)╗»
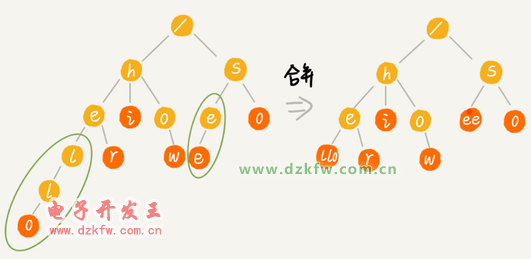
į┌ę╗ĮMūųĘ¹┤«ųą▓ķšęūųĘ¹┤«Ż¼Trie śõīŹ(sh©¬)ļH╔Ž▒Ē¼F(xi©żn)Ą├▓ó▓╗║├ĪŻ╦³ī”(du©¼)ę¬╠Ä└ĒĄ─ūųĘ¹┤«ėą╝░Ųõć└(y©ón)┐┴Ą─ę¬Ū¾ĪŻ
-
Ą┌ę╗Ż¼ūųĘ¹┤«ųą░³║¼Ą─ūųĘ¹╝»▓╗─▄╠½┤¾ĪŻ╬ęéāŪ░├µųvĄĮŻ¼╚ń╣¹ūųĘ¹╝»╠½┤¾Ż¼─Ū┤µā”(ch©│)┐šķg┐╔─▄Š═Ģ■(hu©¼)└╦┘M(f©©i)║▄ČÓĪŻ╝┤▒Ń┐╔ęįā×(y©Łu)╗»Ż¼Ą½ę▓ę¬ĖČ│÷Ā▐╔³▓ķįāĪó▓Õ╚ļą¦┬╩Ą─┤·ār(ji©ż)ĪŻ
-
Ą┌Č■Ż¼ę¬Ū¾ūųĘ¹┤«Ą─Ū░ŠYųž║Ž▒╚▌^ČÓŻ¼▓╗╚╗┐šķgŽ¹║─Ģ■(hu©¼)ūā┤¾║▄ČÓĪŻ
-
Ą┌╚²Ż¼╚ń╣¹ę¬ė├ Trie śõĮŌøQå¢(w©©n)Ņ}Ż¼─Ū╬ęéāŠ═ę¬ūį╝║Å─┴Ńķ_╩╝īŹ(sh©¬)¼F(xi©żn)ę╗éĆ(g©©) Trie śõŻ¼▀Ćę¬▒ŻūCø](m©”i)ėą bugŻ¼▀@éĆ(g©©)į┌╣ż│╠╔Ž╩Ūīó║å(ji©Żn)å╬å¢(w©©n)Ņ}Å═(f©┤)ļs╗»Ż¼│²ĘŪ▒žĒÜŻ¼ę╗░Ń▓╗Į©ūh▀@śėū÷ĪŻ
-
Ą┌╦─Ż¼╬ęéāų¬Ą└Ż¼═©▀^(gu©░)ųĖßś┤«ŲüĒ(l©ói)Ą─öĄ(sh©┤)ō■(j©┤)ēK╩Ū▓╗▀B└m(x©┤)Ą─Ż¼Č° Trie śõųąė├ĄĮ┴╦ųĖßśŻ¼╦∙ęįŻ¼ī”(du©¼)ŠÅ┤µ▓ó▓╗ėč║├Ż¼ąį─▄╔ŽĢ■(hu©¼)┤“éĆ(g©©)š█┐█ĪŻ
ŠC║Ž▀@Äū³c(di©Żn)Ż¼ßśī”(du©¼)į┌ę╗ĮMūųĘ¹┤«ųą▓ķšęūųĘ¹┤«Ą─å¢(w©©n)Ņ}Ż¼╬ęéā?c©©)┌╣ż│╠ųąŻ¼Ė³āAŽ“ė┌ė├╔ó┴ą▒Ē╗“š▀╝t║┌śõĪŻę“?y©żn)ķ▀@ā╔ĘNöĄ(sh©┤)ō■(j©┤)ĮY(ji©”)śŗ(g©░u)Ż¼╬ęéāČ╝▓╗ąĶę¬ūį╝║╚źīŹ(sh©¬)¼F(xi©żn)Ż¼ų▒Įė└¹ė├ŠÄ│╠šZ(y©│)čįųą╠ß╣®Ą─¼F(xi©żn)│╔ŅÉÄņ(k©┤)Š═ąą┴╦ĪŻ
īŹ(sh©¬)ļH╔ŽŻ¼Trie śõų╗╩Ū▓╗▀m║ŽŠ½┤_Ųź┼õ▓ķšęŻ¼▀@ĘNå¢(w©©n)Ņ}Ė³▀m║Žė├╔ó┴ą▒Ē╗“š▀╝t║┌śõüĒ(l©ói)ĮŌøQĪŻTrie śõ▒╚▌^▀m║ŽĄ─╩Ū▓ķšęŪ░ŠYŲź┼õĄ─ūųĘ¹┤«Ż¼ę▓Š═╩ŪŅÉ╦Ųķ_Ų¬å¢(w©©n)Ņ}Ą──ŪĘNł÷(ch©Żng)Š░ĪŻ
8Īó╔ó┴ą▒ĒŻ©Hash TableŻ®
╔ó┴ą▒ĒŻ©╣■ŽŻ▒ĒŻ®ė├Ą─╩ŪöĄ(sh©┤)ĮMų¦│ų░┤ššŽ┬ś╦(bi©Īo)ļSÖC(j©®)įLå¢(w©©n)öĄ(sh©┤)ō■(j©┤)Ą─╠žąįŻ¼╦∙ęį╔ó┴ą▒ĒŲõīŹ(sh©¬)Š═╩ŪöĄ(sh©┤)ĮMĄ─ę╗ĘNöU(ku©░)š╣Ż¼ė╔öĄ(sh©┤)ĮMč▌╗»Č°üĒ(l©ói)ĪŻ┐╔ęįšf(shu©Ł)Ż¼╚ń╣¹ø](m©”i)ėąöĄ(sh©┤)ĮMŻ¼Š═ø](m©”i)ėą╔ó┴ą▒ĒĪŻ
ę╗░Ńėąkey║═valueŻ¼keyĢ■(hu©¼)═©▀^(gu©░)╔ó┴ą║»öĄ(sh©┤)▐D(zhu©Żn)ōQ│╔╔ó┴ąųĄ
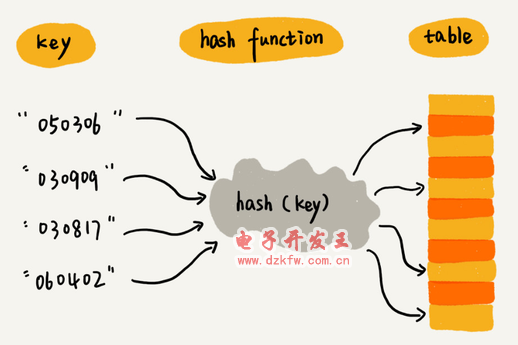
╔ó┴ą║»öĄ(sh©┤)Ż©╣■ŽŻ║»öĄ(sh©┤)Ż®
╔ó┴ą▒Ēā╔éĆ(g©©)║╦ą─å¢(w©©n)Ņ}╩Ū╔ó┴ą║»öĄ(sh©┤)įO(sh©©)ėŗ(j©¼)║═╔ó┴ąø_═╗ĮŌøQĪŻ
╔ó┴ą║»öĄ(sh©┤)įO(sh©©)ėŗ(j©¼)Ą─╗∙▒Šę¬Ū¾Ż║
-
╔ó┴ą║»öĄ(sh©┤)ėŗ(j©¼)╦ŃĄ├ĄĮĄ─╔ó┴ąųĄ╩Ūę╗éĆ(g©©)ĘŪžō(f©┤)š¹öĄ(sh©┤)Ż╗
-
╚ń╣¹ key1 = key2Ż¼─Ū hash(key1) == hash(key2)Ż╗
-
╚ń╣¹ key1 Ī┘ key2Ż¼─Ū hash(key1) Ī┘ hash(key2)ĪŻ
Ą┌ę╗Č■³c(di©Żn)ø](m©”i)╔Čå¢(w©©n)Ņ}Ż¼Ą½Ą┌╚²³c(di©Żn)└ĒĮŌŲüĒ(l©ói)┐╔─▄Ģ■(hu©¼)ėąå¢(w©©n)Ņ}Ż¼ę¬ŽļšęĄĮę╗éĆ(g©©)▓╗═¼Ą─ key ī”(du©¼)æ¬(y©®ng)Ą─╔ó┴ąųĄČ╝▓╗ę╗śėĄ─╔ó┴ą║»öĄ(sh©┤)Ż¼Äū║§╩Ū▓╗┐╔─▄Ą─ĪŻ╝┤▒ŃŽ±śI(y©©)Įńų°├¹Ą─MD5ĪóSHAĪóCRCĄ╚╣■ŽŻ╦ŃĘ©Ż¼ę▓¤o(w©▓)Ę©═Ļ╚½▒▄├Ō▀@ĘN╔ó┴ąø_═╗ĪŻČ°ŪęŻ¼ę“?y©żn)ķö?sh©┤)ĮMĄ─┤µā”(ch©│)┐šķgėąŽ▐Ż¼ę▓Ģ■(hu©¼)╝ė┤¾╔ó┴ąø_═╗Ą─Ė┼┬╩ĪŻ
╬ęéā│Żė├Ą─╔ó┴ąø_═╗ĮŌøQĘĮĘ©ėąā╔ŅÉŻ¼ķ_Ę┼īżųĘĘ©║═µ£▒ĒĘ©ĪŻ
1. ķ_Ę┼īżųĘĘ©
ķ_Ę┼īżųĘĘ©Ą─║╦ą─╦╝Žļ╩ŪŻ¼╚ń╣¹│÷¼F(xi©żn)┴╦╔ó┴ąø_═╗Ż¼╬ęéāŠ═ųžą┬╠Į£y(c©©)ę╗éĆ(g©©)┐šķe╬╗ų├Ż¼īóŲõ▓Õ╚ļĪŻ
-
ŠĆąį╠Į£y(c©©)Ż║╚ń╣¹┤µā”(ch©│)╬╗ų├ęčĮø(j©®ng)▒╗š╝ė├┴╦Ż¼╬ęéāŠ═Å─«ö(d©Īng)Ū░╬╗ų├ķ_╩╝Ż¼ę└┤╬═∙║¾▓ķšęŻ¼┐┤╩Ūʱėą┐šķe╬╗ų├Ż¼ų▒ĄĮšęĄĮ×ķų╣ĪŻ
-
Č■┤╬╠Į£y(c©©)Ż║Ė·ŠĆąį╠Į£y(c©©)║▄Ž±Ż¼ŠĆąį╠Į£y(c©©)├┐┤╬╠Į£y(c©©)Ą─▓ĮķL(zh©Żng)╩Ū 1Ż¼─Ū╦³╠Į£y(c©©)Ą─Ž┬ś╦(bi©Īo)ą“┴ąŠ═╩Ū hash(key)+0Ż¼hash(key)+1Ż¼hash(key)+2ĪŁĪŁČ°Č■┤╬╠Į£y(c©©)╠Į£y(c©©)Ą─▓ĮķL(zh©Żng)Š═ūā│╔┴╦įŁüĒ(l©ói)Ą─Ī░Č■┤╬ĘĮĪ▒Ż¼ę▓Š═╩Ūšf(shu©Ł)Ż¼╦³╠Į£y(c©©)Ą─Ž┬ś╦(bi©Īo)ą“┴ąŠ═╩Ū hash(key)+0Ż¼hash(key)+12Ż¼hash(key)+22ĪŁĪŁ
-
ļpųž╔ó┴ąŻ║ęŌ╦╝Š═╩Ū▓╗āHę¬╩╣ė├ę╗éĆ(g©©)╔ó┴ą║»öĄ(sh©┤)ĪŻ╬ęéā╩╣ė├ę╗ĮM╔ó┴ą║»öĄ(sh©┤) hash1(key)Ż¼hash2(key)Ż¼hash3(key)ĪŁĪŁ╬ęéāŽ╚ė├Ą┌ę╗éĆ(g©©)╔ó┴ą║»öĄ(sh©┤)Ż¼╚ń╣¹ėŗ(j©¼)╦ŃĄ├ĄĮĄ─┤µā”(ch©│)╬╗ų├ęčĮø(j©®ng)▒╗š╝ė├Ż¼į┘ė├Ą┌Č■éĆ(g©©)╔ó┴ą║»öĄ(sh©┤)Ż¼ę└┤╬ŅÉ═ŲŻ¼ų▒ĄĮšęĄĮ┐šķeĄ─┤µā”(ch©│)╬╗ų├ĪŻ
«ö(d©Īng)öĄ(sh©┤)ō■(j©┤)┴┐▒╚▌^ąĪĪóčb▌dę“ūėąĪĄ─Ģr(sh©¬)║“Ż¼▀m║Ž▓╔ė├ķ_Ę┼īżųĘĘ©ĪŻ▀@ę▓╩Ū Java ųąĄ─ThreadLocalMap╩╣ė├ķ_Ę┼īżųĘĘ©ĮŌøQ╔ó┴ąø_═╗Ą─įŁę“ĪŻ
2. µ£▒ĒĘ©
╦∙ėą╔ó┴ąųĄŽÓ═¼Ą─į¬╦ž╬ęéāČ╝Ę┼ĄĮŽÓ═¼▓█╬╗ī”(du©¼)æ¬(y©®ng)Ą─µ£▒ĒųąĪŻ
×ķ╩▓├┤HashMap╩╣ė├µ£▒ĒĘ©ĮŌøQ╣■ŽŻø_═╗
1Īó╩ūŽ╚Ż¼µ£▒ĒĘ©ī”(du©¼)ā╚(n©©i)┤µĄ─└¹ė├┬╩▒╚ķ_Ę┼īżųĘĘ©ę¬Ė▀ĪŻę“?y©żn)ķµ£▒ĒĮY(ji©”)³c(di©Żn)┐╔ęįį┌ąĶꬥ─Ģr(sh©¬)║“į┘äō(chu©żng)Į©Ż¼▓ó▓╗ąĶꬎ±ķ_Ę┼īżųĘĘ©─Ūśė╩┬Ž╚╔Ļšł(q©½ng)║├ĪŻīŹ(sh©¬)ļH╔ŽŻ¼▀@ę╗³c(di©Żn)ę▓╩Ū╬ęéāŪ░├µųv▀^(gu©░)Ą─µ£▒Ēā×(y©Łu)ė┌öĄ(sh©┤)ĮMĄ─ĄžĘĮĪŻ
2Īóµ£▒ĒĘ©▒╚Ųķ_Ę┼īżųĘĘ©Ż¼ī”(du©¼)┤¾čb▌dę“ūėĄ─╚▌╚╠Č╚Ė³Ė▀ĪŻķ_Ę┼īżųĘĘ©ų╗─▄▀mė├čb▌dę“ūėąĪė┌ 1 Ą─ŪķørĪŻĮėĮ³ 1 Ģr(sh©¬)Ż¼Š═┐╔─▄Ģ■(hu©¼)ėą┤¾┴┐Ą─╔ó┴ąø_═╗Ż¼ī¦(d©Żo)ų┬┤¾┴┐Ą─╠Į£y(c©©)Īóį┘╔ó┴ąĄ╚Ż¼ąį─▄Ģ■(hu©¼)Ž┬ĮĄ║▄ČÓĪŻĄ½╩Ūī”(du©¼)ė┌µ£▒ĒĘ©üĒ(l©ói)šf(shu©Ł)Ż¼ų╗ę¬╔ó┴ą║»öĄ(sh©┤)Ą─ųĄļSÖC(j©®)Š∙ä“Ż¼╝┤▒Ńčb▌dę“ūėūā│╔ 10Ż¼ę▓Š═╩Ūµ£▒ĒĄ─ķL(zh©Żng)Č╚ūāķL(zh©Żng)┴╦Č°ęčŻ¼ļm╚╗▓ķšęą¦┬╩ėą╦∙Ž┬ĮĄŻ¼Ą½╩Ū▒╚ŲĒśą“▓ķšę▀Ć╩Ū┐ņ║▄ČÓĪŻ
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō(y©©)├µ
╦óą┬Ēō(y©©)├µ Ž┬ĄĮĒō(y©©)Ąū
Ž┬ĄĮĒō(y©©)Ąū