
ę╗Īóå¢Ņ}/─┐ś╦
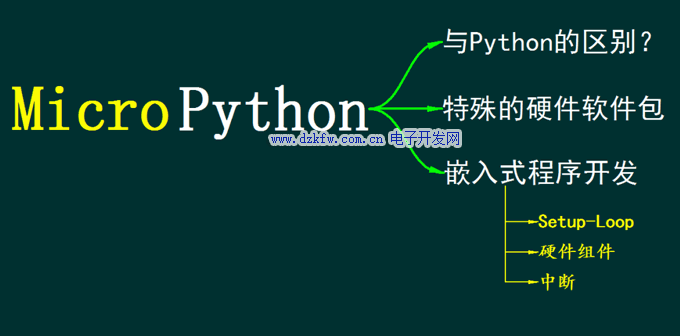
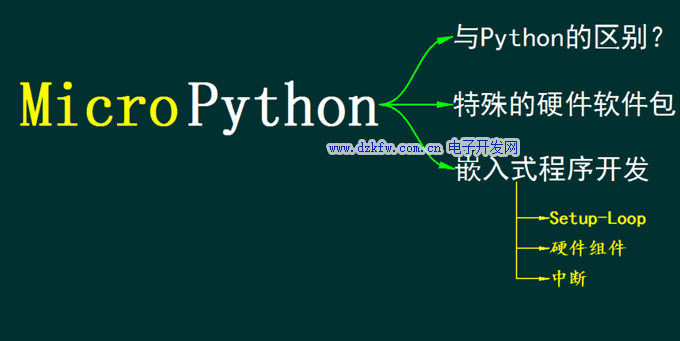
Ū░├µ╬ęéāīW┴Ģ┴╦ PythonšZčįŻ¼ ķ_░l(f©Ī)¤oŠĆļŖ▄ēųŪ─▄▄ć─Ż╩╣ė├Ą─╩Ū MicroPython šZčįŻ¼╚ń║╬Å─ Python šZčįŠÄ│╠Ż¼ ▐D(zhu©Żn)Ž“ MicroPython šZčįŠÄ│╠Ż¼Ž┬├µūī╬ęéāüĒšä?w©┤)äęįŽ┬╚²éĆå¢Ņ}Ż║ Ż©1Ż®╦¹éāų«ķgĄ─ģ^(q©▒)äeŻ╗Ż©2Ż® MicroPythonųą╠ž╩ŌĄ─ė▓╝■ķ_░l(f©Ī)▄ø╝■░³Ż╗Ż©3Ż®į┌ MicroPython ķ_░l(f©Ī)å╬Ų¼ÖCųąŪČ╚ļ╩Į│╠ą“Ą─╚²éĆąĶę¬ūóęŌĄĮĄ─╠ž³cŻ¼Setup-Loop š¹¾w┐“╝▄ĮY(ji©”)śŗ(g©░u)Ż╗ė▓╝■ŽÓĻP(gu©Īn)▄ø╝■ĮY(ji©”)śŗ(g©░u)Ż╗ė▓╝■ųąöÓĄ─╩╣ė├ĪŻŽ┬├µūī╬ęéāųę╗ėæšōę╗Ž┬ĪŻ
Č■Īó╗∙▒ŠįŁ└Ē
1Īó┼cPythonų«ķgĄ─▓Ņ«É
- Introduction to MicroPython ©C Python for Microcontrollers
MicroPython šZčį╩Ū╝»│╔┴╦ Python šZčįĄ─ę╗éĆĘųų¦Ż¼ īŹ¼F(xi©żn)┴╦ Python 3.4 ░µ▒ŠšZčįś╦£╩ĪŻ╦³╩ŪīŻķT×ķį┌å╬Ų¼ÖC▀@ŅÉŪČ╚ļ╩Į╬ó┐žųŲŲ„╔ŽŻ¼ īŹ¼F(xi©żn)Ą─ę╗┐Ņ║åØŹĘĆ(w©¦n)Č©Ą─PythonšZčįĮŌßīŲ„ė╔ė┌╦³ī┘ė┌Ė▀╝ēĮŌßīą═šZčįŻ¼ ╩╣Ą├å╬Ų¼ÖCĄ─ķ_░l(f©Ī)ūāĄ├╚▌ęūŲüĒ¼F(xi©żn)į┌ęčĮø(j©®ng)ėą▒ŖČÓĄ─å╬Ų¼ÖCŲĮ┼_Č╝ų¦│ų MicroPython ▀Mąąæ¬(y©®ng)ė├▄ø╝■Ą─ķ_░l(f©Ī)ĪŻī”ė┌│§īWš▀üĒųvŻ¼ į┌šZĘ©īė├µŻ¼ MicroPython ┼c Python šZčįĄ─▓Ņäe╗∙▒Š╔Ž▓╗ęū▒╗ėX▓ņĪŻ ▀@└’Š═▓╗ū÷š╣ķ_Ż¼ ┤¾╝ę╚ń╣¹Ėą┼d╚żŻ¼┐╔ęįį┌ MicroPython ╣┘ŠW(w©Żng)▀Mąą▓ķ┐┤ĪŻ ūŅ║¾ąĶ꬚f├„ę╗³cĄ─╩ŪŻ¼ ×ķ┴╦▒Ńė┌▄ø╝■ķ_░l(f©Ī)Ż¼ į┌MicroPythonųąėąę╗ĘNĮ╗╗ź╩Į│╠ą“ķ_░l(f©Ī)─Ż╩ĮŻ¼ REPLŻ¼ ę▓Š═╩Ū Read Evaluate Print LoopĪŻMicroPython į┌┤╦─Ż╩ĮŽ┬Ż¼ ▓╗öÓūx╚ĪÅ─┤«┐┌▌ö╚ļĄ─ MicroPython ųĖ┴ŅŻ¼ ł╠(zh©¬)ąą║¾Ż¼ ▀MąąĮY(ji©”)╣¹▌ö│÷ĪŻ▀@éĆ▀^│╠▓╗öÓ裣h(hu©ón)Ż¼ ą╬│╔ę╗éĆĮ╗╗ź╩Įķ_░l(f©Ī)─Ż╩ĮĪŻ
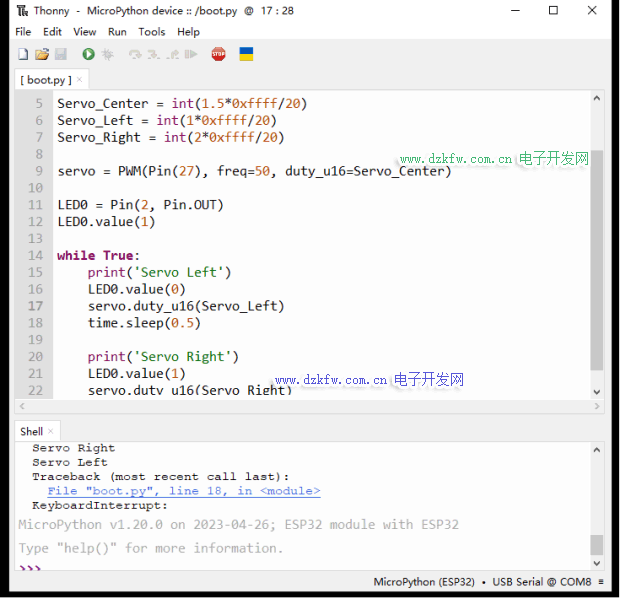
▒╚╚ńį┌Thonny Łh(hu©ón)Š│ųąŻ¼└¹ė├╔Ž├µ│╠ą“ŠÄ▌ŗ┤░┐┌▀Mąą▄ø╝■ķ_░l(f©Ī)ī┘ė┌š²│Ż│╠ą“ķ_░l(f©Ī)Ż¼į┌ShellųąŠ═┐╔ęį╩╣ė├ REPL ÖCųŲ▀MąąĮ╗╗ź╩Įķ_░l(f©Ī)Ż¼▒╚╚ńŽ┬├µč▌╩Šį┌ Shell ųą ├³┴Ņ╠ß╩ŠĘ¹║¾├µ▌ö╚ļ▓╗═¼├³┴ŅŻ¼ ╗ž▄ć║¾Ż¼ MicroPython ł╠(zh©¬)ąąĮY(ji©”)╣¹Ą─č▌╩ŠĪŻ╩ų╣ż▌ö╚ļŻ¼ ╗“š▀┐ĮžÉŪ░├µĄ─├³┴ŅŻ¼ Č╝┐╔ęį▀Mąął╠(zh©¬)ąąĪŻ
2Īóė▓╝■▄ø╝■░³
×ķ┴╦æ¬(y©®ng)ė├ĄĮå╬Ų¼ÖCŲĮ┼_ųąĄ─ė▓╝■─ŻēKŻ¼į┌ MicroPython ųą▀Ć╝»│╔┴╦║▄ČÓ╠ž╩ŌĄ─▄ø╝■░³ĪŻæ¬(y©®ng)ė├▀@ą®▄ø╝■░³┐╔ęįČ©┴xę╗ą®┼cė▓╝■ŽÓĻP(gu©Īn)Ą─ī”Ž¾Ż¼ ęį╝░ŽÓĻP(gu©Īn)Ą─ė▓╝■║»öĄ(sh©┤)Įė┐┌ĪŻ
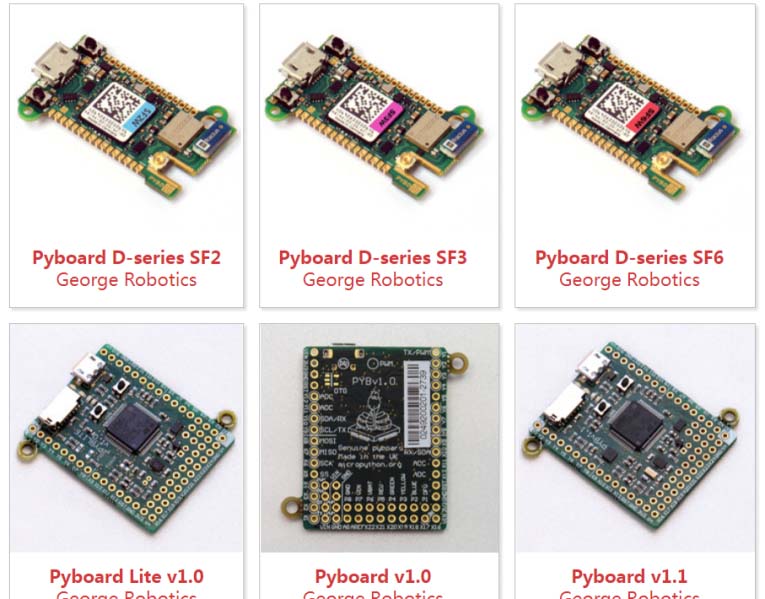
▀@└’ęį¤oŠĆļŖ▄ēųŪ─▄▄ćųž║╦ą─┐žųŲ░Õ ESP32×ķ└²Ż¼ į┌╦³Ą─MicroPython ųąŠ═╝»│╔┴╦║▄ČÓĄ─ė▓╝■▄ø╝■░³░³└©ėą╣▄─_Īó«É▓Į┤«┐┌ĪóPWMĪóADC ęį╝░═Ō▓┐Ą─ I2CŻ¼ SPI ┤«ąąĮė┐┌Ą╚ĪŻ═©▀^▀@ą®╠ž╩ŌĄ─ė▓╝■“ī(q©▒)äė▄ø╝■░³Ż¼ ╬ęéāŠ═┐╔ęįį┌Python šZčįųąįLå¢└¹ė├▀@ą®ė▓╝■┘Yį┤Ż¼ üĒ┐žųŲ▄ć─ŻĄ─▀\ąąŻ¼ Ėąų¬═Ō▓┐Łh(hu©ón)Š│Ą╚ĪŻ▒╚╚ń▀@└’╩Ū I2C┐éŠĆ▄ø╝■░³Ż¼ ═©▀^╦³┐╔ęį▀BĮėå╬Ų¼ÖC═Ō▓┐║▄ČÓ┘Yį┤Ż¼×ķ┴╦æ¬(y©®ng)ė├▀@éĆČ╦┐┌Ż¼┐╔ęį import machine ▄ø╝■░³ųąĄ─ PinŻ¼ I2C ─ŻēKŻ¼═©▀^Č©┴xŽÓæ¬(y©®ng)Ą─ī”Ž¾Ż¼ įO(sh©©)ų├ I2C ┐éŠĆČ╦┐┌Ą─ī┘ąįŻ¼▓ó┼c═Ō▓┐įO(sh©©)éõ═©ą┼ĪŻ

═©▀^īŹ“× šŲ╬šĖ³ČÓå╬Ų¼ÖCĄ─▀@ą®ė▓╝■┘Yį┤Ą─╠ž³c║═╩╣ė├ĘĮĘ©╩Ūæ¬(y©®ng)ė├å╬Ų¼ÖCĮŌøQ▄ć─Ż┐žųŲå¢Ņ}Ą─╣▄─_╦∙į┌ĪŻ
3ĪóŪČ╚ļ╩Į│╠ą“ķ_░l(f©Ī)
ūŅ║¾Ż¼ ╬ęéāėæšōę╗Ž┬ MicroPython ķ_░l(f©Ī)ŪČ╚ļ╩Į│╠ą“Ą─╠ž³cĪŻī”ė┌│§īWš▀ąĶę¬ūóęŌ╚²éĆĘĮ├µĄ─ā╚(n©©i)╚▌ĪŻĄ┌ę╗éĆŠ═╩Ū│╠ą“ų„Ņ}┤¾¾w╔Ž│╩¼F(xi©żn)įO(sh©©)ų├┼c裣h(hu©ón)ā╔▓┐ĘųĪŻį┌įO(sh©©)ų├▓┐ĘųŻ¼═∙═∙ąĶę¬ import ╦∙ąĶꬥ─▄ø╝■░³Īó ī”│╠ą“▄ø╝■ūā┴┐║═ė▓╝■─ŻēK▀Mąą│§╩╝╗»Ą╚╚╗║¾│╠ą“▀M╚ļę╗éĆė╔ for ╗“š▀ while šZŠõśŗ(g©░u)│╔Ą─¤oŽ▐裣h(hu©ón)ĮY(ji©”)śŗ(g©░u)Ż¼ į┌▀@éĆĮY(ji©”)śŗ(g©░u)ųąų▄Ų┌Ą─ł╠(zh©¬)ąąę╗ŽĄ┴ąĄ─ųĖ┴ŅŻ¼ ═Ļ│╔┐žųŲĄ─ų„ę¬╚╬äš(w©┤)ĪŻĄ┌Č■▓┐ĘųŠ═╩ŪąĶę¬└ĒĮŌ│╠ą“ųą░³║¼ėąę╗ą®┼cė▓╝■ŽÓĻP(gu©Īn)Ą─ūā┴┐Īóī”Ž¾Ą╚ĪŻ╦³éāąĶę¬▓╗═ŻĄ─▀MąąčŁŁh(hu©ón)╦óą┬║═Ę∙ųĄŻ¼▀@ą®īŹĢrūā┴┐Ą─ųĄĘ┤ė│┴╦å╬Ų¼ÖC═Ō▓┐Č╦┐┌Ą─ļŖē║ą┼╠¢Ż¼ ╗“š▀═©ėŹöĄ(sh©┤)ō■(j©┤)Ą╚Ż¼ ═©▀^Ū░├µĄ─裣h(hu©ón)ĮY(ji©”)śŗ(g©░u)▀Mąąų▄Ų┌Ą─ūx╚Ī╗“š▀┘xųĄĪŻ ūŅĮKą╬│╔ī”═Ō▓┐ļŖ┬ĘĄ─┐žųŲĪŻ
ūŅ║¾ųvę╗Ž┬į┌▄ć─Ż┐žųŲųąĢ■┼÷ĄĮĄ─┴Ē═Ōę╗éĆ╠ž╩ŌŠÄ│╠╝╝ąg(sh©┤)Ż¼ ─ŪŠ═╩ŪųąöÓĪŻųąöÓ╩Ūį┌ å╬Ų¼ÖCā╚(n©©i)▓┐ė▓╝■į┌ØMūŃ─│ą®Śl╝■Ž┬ł╠(zh©¬)ąąĄ─│╠ą“Ų¼Č╬Ż¼ ▒╚╚ń«öČ©ĢrŲ„ė▓╝■│÷¼F(xi©żn)ęń│÷╩ŪĢ■«a(ch©Żn)╔·ų▄Ų┌Ą─Č©ĢrŲ„ųąöÓŻ╗ į┌═Ō▓┐Č╦┐┌│÷¼F(xi©żn)ļŖē║ūā╗»ĢrĢ■│÷¼F(xi©żn) IO ą┼╠¢ųąöÓŻ╗į┌┤«┐┌Įė╩šĄĮöĄ(sh©┤)ō■(j©┤)Ą─Ģr║“Ģ■│÷¼F(xi©żn)┤«┐┌═©ėŹųąöÓĄ╚ĪŻņ`╗ŅĄ─æ¬(y©®ng)ė├ųąöÓ╩Ūå╬Ų¼ÖCŪČ╚ļ╩Įķ_░l(f©Ī)Ą─ųžę¬╝╝Ū╔ĪŻ ═©│ŻŪķørŽ┬Ż¼ Ū░├µĄ─ Loop 裣h(hu©ón) ęį╝░ųąöÓ│╠ą“Ż¼ į┌ŪČ╚ļ╩Į▄ø╝■ķ_░l(f©Ī)ųą═∙═∙▒╗ĘQ×ķŪČ╚ļ╩Į│╠ą“Ą─ ║¾┼_ ╚╬äš(w©┤)║═ Ū░┼_ ╚╬äš(w©┤)ĪŻ
╚²Īóæ¬(y©®ng)ė├┼e└²
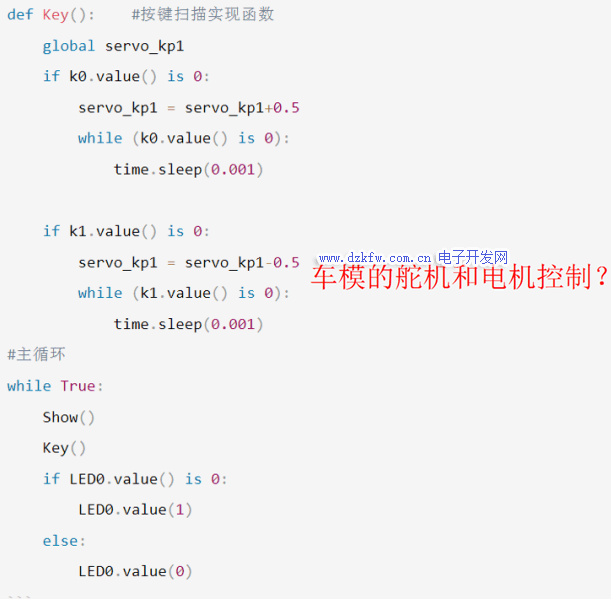
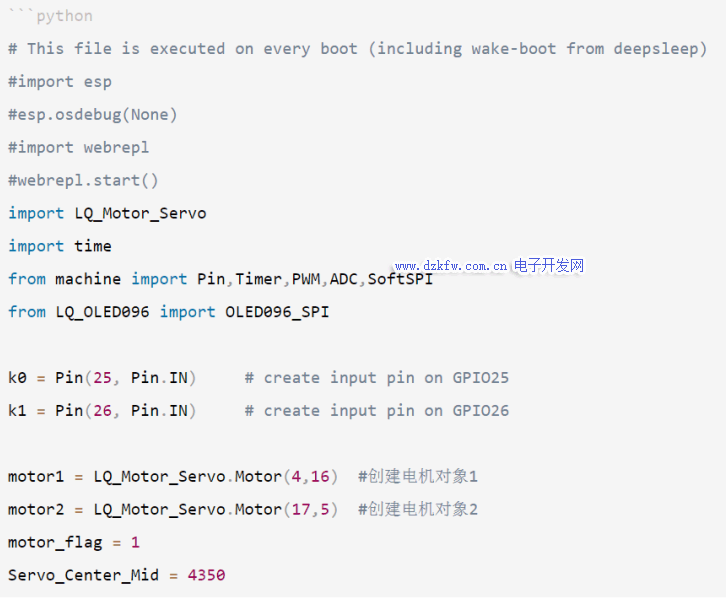
▀@└’ęį¤oŠĆļŖ▄ēųŪ─▄▄ćŠC║Ž£yįć│╠ą“×ķ└²Ż¼ üĒšf├„ę╗Ž┬ MicroPython │╠ą“Ą─╠ž³cĪŻī”ė┌│§īWš▀üĒ┐┤Ż¼ ▀@éĆ│╠ą“’@Ą├ėą³cÅ═ļsŻ¼Ą½į┌š¹¾w╔ŽŻ¼ ┤¾╝ę┐┤ĄĮŻ¼ ╦³Ęų×ķŪ░║¾ā╔▓┐ĘųĪŻ Ū░├µ▓┐Ęųī┘ė┌ Setup │§╩╝╗»▓┐ĘųŻ¼ ū÷┴╦║▄ČÓĄ─ė▓╝■│§╩╝╗»Ż¼ ę▓Č©┴x┴╦ę╗ą®║»öĄ(sh©┤)ĪŻ║¾├µę╗▓┐ĘųŻ¼Š═╩Ūėą while ą╬│╔Ą─ 裣h(hu©ón)┐žųŲ▓┐ĘųŻ¼ ▀@ą®ī┘ė┌▄ø╝■Ą─║¾┼_╚╬äš(w©┤)▓┐ĘųĪŻį┌├┐ę╗┤╬裣h(hu©ón)ųąę└┤╬ł╠(zh©¬)ąą OLED Ų┴─╗Ą─╦óą┬Ż¼░┤µIĄ─Öz£y╠Ä└ĒŻ¼ęį╝░┐žųŲ░Õ╔Ž LED Ą─ķWĀqŻ¼ ė├ė┌’@╩Š│╠ą“▀\ąąĀŅæB(t©żi)ĪŻ┤╦Ģr╣└ėŗ┤¾╝ęĢ■ėąę╗éĆę╔å¢Ż¼ ▄ć─Ż▀\äėųąČµÖC║═ļŖÖC┐žųŲ┤·┤aį┌──└’ł╠(zh©¬)ąą─žŻ┐
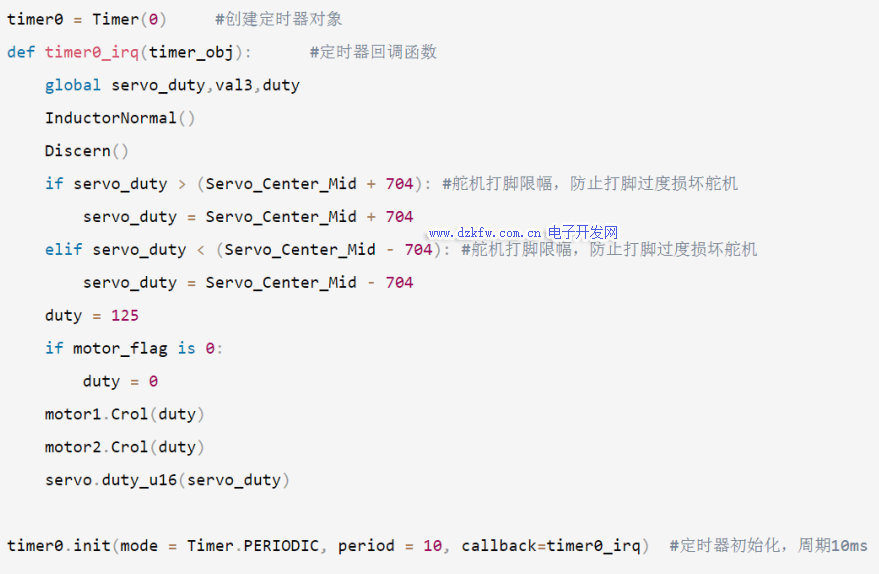
×ķ┴╦ĮŌøQ▀@éĆę╔å¢Ż¼ ┤¾╝ę┐┤▀@éĆŠC║Žč▌╩Š│╠ą“Ą─ųąķg▓┐ĘųŻ¼į┌▀@└’Č©┴x┴╦ ESP32 ė▓╝■Č©ĢrŲ„ī”Ž¾Ż¼ timer0Ż¼ĮėŽ┬üĒČ©┴x┴╦ę╗éĆ║»öĄ(sh©┤)Ż¼ ė├ė┌Č©ĢrŲ„ųąöÓ║»öĄ(sh©┤)║¾├µ╩Ūī”Č©ĢrŲ„▀Mąą│§╩╝╗»Ż¼įO(sh©©)ų├Č©ĢrŲ„╣żū„─Ż╩Į×ķų▄Ų┌ųąöÓ─Ż╩ĮŻ¼ųąöÓų▄Ų┌×ķ 10║┴├ļŻ¼ ę▓Š═╩Ū100Hz Ą─ųžÅ═Ņl┬╩Ż¼Ą┌╚²éĆģóöĄ(sh©┤)įO(sh©©)ų├ųąöÓĘ■äš(w©┤)│╠ą“ĪŻ▀@éĆ│╠ą“Š═╩ŪŪ░├µČ©┴xĄ─ timer0 irq ║»öĄ(sh©┤)ĪŻę“┤╦▀@éĆųąöÓ│╠ą“Š═Ģ■į┌ Timer0 Ą─ųąöÓ“ī(q©▒)äėŽ┬Ż¼ ├┐Ė¶Š½┤_Ą─ 10║┴├ļŻ¼ Š═▒╗ł╠(zh©¬)ąąę╗┤╬ĪŻ ųąöÓ│╠ą“?q©▒)┘ė┌ŪČ╚ļ╩Į▄ø╝■Ą─Ū░┼_╚╬äš(w©┤)ĪŻ ųąöÓ│╠ą“Č©┴x┴╦ųąöÓ╚╬äš(w©┤)▀@ą®╩ŪąĶę¬ė├ĄĮĄ─╚½Šųūā┴┐Ż¼ ║═│╠ą“ųąŲõ╦³║»öĄ(sh©┤)▀Mąąą┼Žóé„▀fĪŻūx╚ĪļŖ┤┼ł÷é„ĖąŲ„Ą─Į╗┴„ļŖē║ųĄ┼ąöÓ┘ÉĄ└Ą─ī┘ąįėŗ╦ŃȵÖCŲ½ęŲ┴┐ī”ȵÖCŲ½ęŲ┴┐▀MąąŽ▐Ę∙Ž┬├µŠ═╩ŪįO(sh©©)ų├ļŖÖC▀\ąą╦┘Č╚║═ȵÖCŲ½ęŲ┴┐ĪŻųąķg▓┐Ęų╩Ūė├ė┌┐žųŲļŖÖC╩Ūʱ▀\ąąĄ─▀ē▌ŗĪŻų«╦∙ęį└¹ė├ųąöÓų▄Ų┌▀Mąą▄ć─Ż┐žųŲŻ¼ ų„ę¬╩Ū×ķ┴╦▒ŻūC┐žųŲĢrķgĄ─Š½┤_║═ų▄Ų┌Ą─ĘĆ(w©¦n)Č©ĪŻ ▀@ę¬▒╚į┌ while 裣h(hu©ón)ųął╠(zh©¬)ąą┐žųŲ├³┴ŅĖ³╝ė┐╔┐┐ĪŻ
┤¾╝ęĖą┼d╚ż▀Ć┐╔ęį蹊┐ę╗Ž┬▀@éĆ│╠ą“Ū░├µĄ─│§╩╝╗»▀^│╠Ż¼ī”ė┌ę╗ą®║═ė▓╝■ŽÓĻP(gu©Īn)Ą──ŻēKĄ─╩╣ė├Ż¼┐╔ęį┼õ║Ž║¾├µŽÓĻP(gu©Īn)Ą─īŹ“×ĮķĮB▀Mąą┬ō(li©ón)ŽĄĪŻ═©▀^▀@éĆ│╠ą“Ż¼ ┤¾╝ę─▄ē“╩ņŽż MicroPython ŠÄīæŪČ╚ļ╩Į▄ø╝■Ą─ę╗ą®╠ž³cĪŻ
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū