
本篇博客我們來探究下多旋翼無人機的飛行原理
力的來源
飛行原理從根上說的話就是系統運動力的來源是什么?在基本組成部分介紹了無人機的動力系統:電調-電機-螺旋槳 。
給人最直觀的感受就是 電機帶動螺旋槳轉,產生升力。
螺旋槳旋轉產生升力的原因,在很多年前伯努利就給出了解釋,簡單說就是流速大,壓強小;流速小,壓強大,也就是伯努利定理。伯努利原理是流體力學中的一條基本原理,它由瑞士流體物理學家丹尼爾·伯努利在1726年提出,其實質是理想流體的機械能守恒。在理想條件下,同一流管的任何一個截面處,單位體積流體的動能、勢能和壓力勢能之和是一個常量 。其最為著名的推論為:等高流動時,流速越大,壓強越小。流體力學中經常說的壓力,其實指的是單位面積上的壓力,也就是普通物理學里說的壓強。
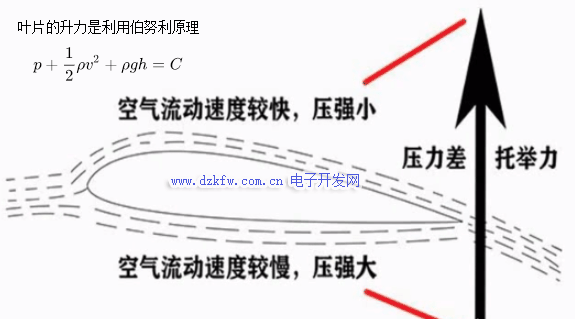

可以看到螺旋槳的槳面并不是平的,旋轉時槳面上下的空氣流速不一直,會產生向上的推力。
飛行原理
上面我們知道了飛行動力的來源,下面我們來詳細介紹下多旋翼無人機的飛行原理。
以四軸飛行器為例。四軸飛行器系統采用位于機臂末端的電機帶動螺旋槳旋轉產生反作用力方式實現飛行器的控制。單個螺旋槳向下吹動空氣產生垂直向上的反作用力,及與旋轉方向相反的空氣摩擦阻力。
螺旋槳分為正槳和反槳,正槳逆時針旋轉向下吹風,反槳順時針旋轉向下吹風。以正槳為例,其旋轉時受力如圖:

如圖所示,紅色為螺旋槳逆時針旋轉方向,黑色 F1 為垂直向上的反作用力,
F2 為空氣摩擦阻力。
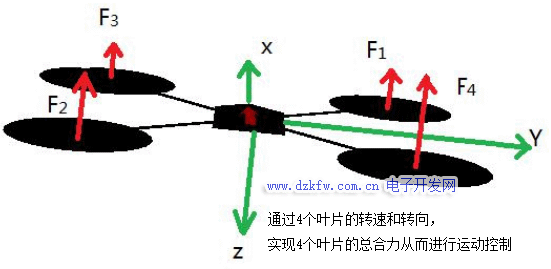
安螺旋槳布局位置不同四旋翼無人機可分為“十”和“X”型結構,以“X”型結構為例,下面分析“X”型結構的飛行原理。
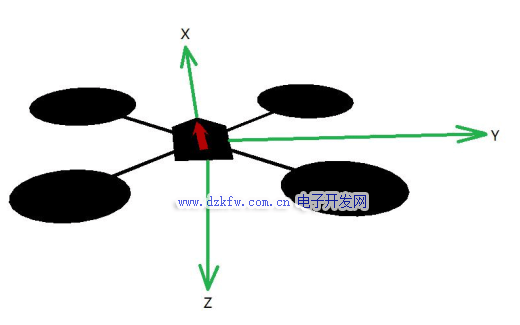
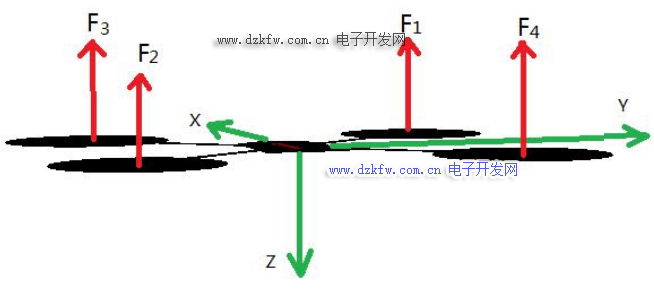
四軸飛行器系統可通過同時調節電機的轉速,實現三維空間六自由度的飛行。以四旋翼飛行器質點為原點,機頭前方為 x 軸正方向,機頭右方為 y 軸正方向,機體垂直向下為 z 軸正方向,滿足右手定則建立機體坐標系。
四軸飛行器系統的基本運動可分為繞 x 軸的橫滾運動、繞 y 軸的俯仰運動、繞 z 軸的偏航運動以及沿 z 軸方向的升降運動。
橫滾運動
四軸飛行器系統通過同時加大 1 號和 4 號電機的轉速、減小 2 號和 3 號電機的轉速,產生 x 軸兩側的升力差,在理想情況下, 2、 3 號電機減小的百分比與 1、4 號電機增大的百分比相等,以此來保證飛行器系統垂直方向的合力為 0,同時產生沿 x 軸方向的水平分力,產生橫滾角度α。

理想力學方程如下:

俯仰運動
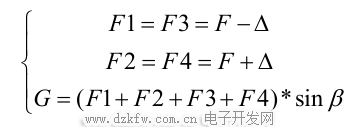
四軸飛行器系統通過同時加大 2 號和 4 號電機的轉速、減小 1 號和 3 號電機的轉速,產生 y 軸兩側的升力差,在理想情況下, 2、 4 號電機減小的百分比與 1、3 號電機增大的百分比相等,以此來保證飛行器系統垂直方向的合力為 0,同時產生沿 y 軸方向的水平分力,產生俯仰角度β。
理想力學方程如下:
偏航運動
四軸飛行器系統通過同時加大 1 號和 2 號電機的轉速、減小 3 號和 4 號電機的轉速,產生反扭矩力差,在理想情況下,1、2 號電機減小的百分比與 3、4 號電機增大的百分比相等,以此來保證飛行器系統垂直方向的合力為 0,同時產生繞 z 軸旋轉的力。

理想力學方程如下:

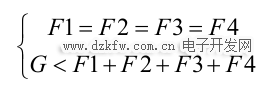
升降運動
同時增大或減小四個電機,當四個電機提供的拉力大于飛行器自身重力時將產生上升運動,當四個電機提供的拉力小于飛行器自身重力時將產生下降運動。
旋翼無人機運動本質就是控制電機的速度,相應地提高、減慢速度就可以讓無人機以各種狀態運動起來。
如果在 機架、動力、飛控、遙控器,齊全的情況下,在飛控中,不加入復雜的控制算法,僅將遙控器指令,轉換為運動的電機轉速增減量,即可讓無人機在空中飛起來。但是此種情況的無人機會非常難以控制,需要不斷的修各個方向的桿量,這就是所謂的純手控模式,不建議嘗試。
無人機的控制模式
純手動模式
就是上面說的模式,遙控器的桿量,和運動模式的電機轉速形成開環的控制量,無人機會異常靈敏,難以控制。這種模式在無人機的算法或者傳感器出現問題,導致無人機自動控制無法實現的時候,可以嘗試救一下。
姿態模式
姿態模式就是飛控層面起到了部分自動控制的功能。
飛控會通過各種傳感器,感知自身的狀態,包括姿態角度和姿態角速度。
同時飛控會通過接收遙控器的桿量,將桿量轉為期望姿態值,然后通過閉環控制對無人機姿態值進行自動控制。
這種控制模式,相對純手動來說,飛機會穩定很多,但是當遙控器桿量回中后,無人機會向一個方向飄,因為桿量回中代表期望姿態角度為0.但是在某方向上存在速度,無人機就按這個速度方向飄了出去。
定高模式
飛控自身會攜帶氣壓計,和慣導融合,感知自身高度狀態,當油門桿量輸入為中值時,以當前高度為期望高度,形成閉環控制。
無人機在z軸方向,可以實現位置穩定。水平方向相當于姿態模式,無法實現位置穩定。
懸停模式
飛控通過GPS或其它定位傳感器,和慣導融合,感知自身位置狀態。當桿量輸入為中值時,以當前位置為期望位置,形成閉環控制。
無人機在x、y、z軸方向,可以實現位置穩定。
其它模式
這里把其它的模式歸為一類,像自動航線模式、指點飛行模式、興趣點環繞模式等,都是建立在懸停模式的基礎上,只是期望位置的輸入方式不一樣罷了。
 返回頂部
返回頂部 刷新頁面
刷新頁面 下到頁底
下到頁底