
1Īóų▒┴„ļŖÖC(j©®)║åĮķ
2ĪóįO(sh©©)ėŗųąĄ─╚²éĆĻP(gu©Īn)ūó³c(di©Żn)
3ĪóHś“ļŖ┬Ę
4Īó“ī(q©▒)äėąŠŲ¼▀xō±Ģr┐╝æ]Ą─å¢Ņ}
5ĪóL298ąŠŲ¼╝░“ī(q©▒)äė─ŻēK
6ĪóļŖÖC(j©®)š²Ę┤▐D(zhu©Żn)│╠ą“
7ĪóļpļŖÖC(j©®)▓Ņ╦┘▐D(zhu©Żn)Ž“Ą─įŁ└Ē
8Īó└¹ė├▓Ņ╦┘īŹ(sh©¬)¼F(xi©żn)ąĪįŁįŁĄž┤“▐D(zhu©Żn)│╠ą“
1Īóų▒┴„ļŖÖC(j©®)║åĮķ
ų▒┴„ļŖÖC(j©®)╩ŪųŪ─▄ąĪ▄ć╝░ÖC(j©®)Ų„╚╦ųŲū„▒ž▓╗┐╔╔┘Ą─ĮM│╔▓┐ĘųŻ¼╦³ų„ę¬ū„ė├╩Ū×ķŽĄĮy(t©»ng)╠ß╣®▒žĒÜĄ─“ī(q©▒)äė┴”Ż¼ė├ęįīŹ(sh©¬)¼F(xi©żn)ŲõĖ„ĘN▀\(y©┤n)äėĪŻ─┐Ū░╩ą├µĄ─ų▒┴„ļŖÖC(j©®)ų„ę¬Ęų×ķŲš═©ļŖÖC(j©®)║═Ħäė²X▌åé„äėÖC(j©®)śŗ(g©░u)Ą─ų▒┴„£p╦┘ļŖÖC(j©®)ĪŻ╚ńłD1║═łD2╦∙╩ŠĪŻ


łD1 ╚š▒Š±R▓ĮŲµĖ▀╦┘ļŖÖC(j©®)RS380 łD2 N20£p╦┘ų▒┴„ļŖÖC(j©®)
ī”ė┌▓╗╠½ūĘŪ¾╦┘Č╚Ą─ł÷║Žæ¬(y©®ng)ā×(y©Łu)Ž╚▀xė├£p╦┘ų▒┴„ļŖÖC(j©®)Ż¼╚ńūŃŪ“ÖC(j©®)Ų„║═£ń╗ÖC(j©®)Ų„╚╦Ą╚ūĘŪ¾╣”─▄Č°ī”╦┘Č╚ę¬Ū¾▓╗Ė▀Ą─ł÷║ŽŻ¼╚ńłD3Ż¼┤╦▄ćĄ─é„äė▒╚═©│Ż×ķÄū╩«ĄĮÄū░┘ū¾ėęĪŻę╗░Ńī”═¼ę╗ą═╠¢Ą─£p╦┘ļŖÖC(j©®)Ż¼ÅS╝ęČ╝Ģ■╠ß╣®ČÓĘNé„äė▒╚Ą─«a(ch©Żn)ŲĘ╠ß╣®Įoė├æ¶Ż¼æ¬(y©®ng)Ė∙ō■(j©┤)ąĶę¬╝ėęį▀xō±ĪŻ

łD3 Ųš═©£p╦┘ļŖÖC(j©®)æ¬(y©®ng)ė├
Č°ī”ė┌Ųš═©ų▒┴„ļŖÖC(j©®)Ż¼ė╔ė┌▐D(zhu©Żn)╦┘▒╚▌^Ė▀Ż¼Š▀¾wæ¬(y©®ng)ė├Ģræ¬(y©®ng)╝ė²X▌åé„äėÖC(j©®)śŗ(g©░u)Ż¼«ö(d©Īng)╚╗ę▓┐╔ęįų▒Įė▀xō±£p╦┘ų▒┴„ļŖÖC(j©®)Ż¼Ą½╚ń╣¹ī”ė┌ę╗ą®╦┘Č╚ę¬Ū¾▒╚▌^Ė▀Ą─æ¬(y©®ng)ė├Ż¼╚ń’w╦╝┐©Ā¢ųŪ─▄▄ć▄ć─ŻŻ¼ė╔ė┌įō▒╚┘Éī┘ė┌Ėé╦┘┘ÉŻ¼ī”╦┘Č╚ę¬Ū¾▒╚▌^Ė▀Ż¼╩ą├µ╔Žę╗░Ń║▄ļyšęĄĮ║Ž▀mĄ─£p╦┘ļŖÖC(j©®)Ż¼┤╦ĢrŠ═ąĶę¬ūį╝║įO(sh©©)ėŗ£p╦┘ÖC(j©®)śŗ(g©░u)Ż¼╚ńłD4×ķ’w╦╝┐©Ā¢Ą─ļŖÖC(j©®)║═£p╦┘ÖC(j©®)śŗ(g©░u)łDŻ¼┤╦é„äėÖC(j©®)śŗ(g©░u)é„äė▒╚×ķ1Ż║10ū¾ėęŻ¼╩╣Ą├ąĪ▄ćį┌┐š▌dĄ─ŪķørŽ┬┐╔▀_(d©ó)ĄĮ╔ŽŪ¦▐D(zhu©Żn)ĪŻ

łD4 ’w╦╝┐©Ā¢ųŪ─▄▄ćB▄ć─Ż
¤ošō╩ŪŲš═©ų▒┴„ļŖÖC(j©®)▀Ć╩Ū£p╦┘ļŖÖC(j©®)Ż¼ŲõļŖÖC(j©®)▓┐Ęų─┐Ū░╗∙▒ŠČ╝╩Ū¤o╦óų▒┴„ļŖÖC(j©®)Ż¼ĻP(gu©Īn)ė┌╩▓├┤Įą¤oļŖÖC(j©®)ęį╝░ā╚(n©©i)▓┐ĮY(ji©”)śŗ(g©░u)╚ń║╬Ż¼▀@└’╬ęéā▓╗╚ź╔ŅŠ┐Ż¼Ž┬├µųž³c(di©Żn)ĮķĮBę╗Ž┬ų▒┴„ļŖÖC(j©®)į┌īŹ(sh©¬)ļH╩╣ė├▀^│╠į┌ė▓╝■Ą─įO(sh©©)ėŗ╝░▄ø╝■Ą─ŠÄīæųąæ¬(y©®ng)«ö(d©Īng)ĻP(gu©Īn)ūóĄ─╚²éĆĘĮ├µŻ¼▀@└’Ą─Ū░╠ß╩Ū─ŃęčĮø(j©®ng)Ė∙ō■(j©┤)ąĶę¬▀xō±║├┴╦║Ž▀mé„äė▒╚Ą─ļŖÖC(j©®)ĪŻ
2ĪóįO(sh©©)ėŗųąĄ─╚²éĆĻP(gu©Īn)ūó³c(di©Żn)
1Ż® ╚ń║╬į÷┤¾“ī(q©▒)äė
2Ż® ╚ń║╬īŹ(sh©¬)¼F(xi©żn)ōQŽ“
3Ż® ╚ń║╬īŹ(sh©¬)¼F(xi©żn)š{(di©żo)╦┘
ī”ė┌Ą┌ę╗éĆå¢Ņ}Ż¼ų„ę¬įŁę“╩ŪļŖÖC(j©®)ī┘ė┌┤¾╣”┬╩Ą─Ų„╝■Ż¼Č°å╬Ų¼ÖC(j©®)Ą─I/O┐┌╦∙╠ß╣®Ą─ļŖ┴„═∙═∙╩«╚fėąŽ▐Ż¼╦∙ęį▒žĒÜ═Ō╝ė“ī(q©▒)äėļŖ┬ĘŻ¼▒╚╚ńšfė╔╚²śO╣▄ĮM│╔Ę┼┤¾ļŖ┬ĘĪŻ
ī”ė┌Ą┌Č■éĆå¢Ņ}Ż¼ų▒┴„ļŖÖC(j©®)Ą─ĘĮŽ“Ė─ūāąĶę¬Ė─ūāļŖÖC(j©®)Ą─śOąįŻ¼╝┤š²žō(f©┤)Ę┤ĮėŻ¼Ą½─┐Ū░┤¾ČÓöĄ(sh©┤)ÖC(j©®)Ų„╚╦ųŲū„ųą╩╣ė├Ą─╩Ūų▒┴„¤o╦óļŖÖC(j©®)Ż¼ė╔ė┌ø]ėąļŖ╦óŻ¼Č°╣®ļŖļŖį┤═©│Żėų×ķå╬ļŖį┤Ż¼╦∙ęįąĶę¬įO(sh©©)ėŗę╗éĆļŖūėķ_ĻP(gu©Īn)ęįīŹ(sh©¬)¼F(xi©żn)ōQŽ“╣”─▄ĪŻ
ī”ė┌Ą┌╚²éĆå¢Ņ}Ż¼ÖC(j©®)Ų„╚╦╩Ūę╗éĆąĶ▀mæ¬(y©®ng)▓╗═¼Łh(hu©ón)Š│Ą─ųŪ─▄¾wŻ¼Ųõ▀\(y©┤n)äė╦┘Č╚ąĶę¬▓╗öÓĄ─Ė─ūāŻ¼┤╦ĢrŠ═ąĶꬎļĘ©įO(sh©©)ėŗŽÓæ¬(y©®ng)ļŖ┬ĘęįīŹ(sh©¬)¼F(xi©żn)š{(di©żo)╦┘Č╚ĪŻ
╔Ž├µĄ─╚²éĆå¢Ņ}╩ŪļŖÖC(j©®)┐žųŲųą▒žĒÜę¬┐╝æ]Ą─å¢Ņ}Ż¼┐╔ęį═©▀^ė▓╝■Ą─ĘĮĘ©īŹ(sh©¬)¼F(xi©żn)Ż¼ę▓┐╔ęį═©▀^▄ø╝■Ą─ĘĮĘ©īŹ(sh©¬)¼F(xi©żn)Ż¼«ö(d©Īng)╚╗ę▓┐╔ęį▓╔╚Īė▓▄øĮY(ji©”)║ŽĄ─ĘĮĘ©ĮŌøQĪŻ─┐Ū░▒╚▌^═©ė├Ą─ĘĮĘ©╩ŪŻ¼įO(sh©©)ėŗHś“ļŖ┬Ę║═└¹ė├å╬Ų¼ÖC(j©®)«a(ch©Żn)╔·PWM▓©ą┼╠¢ĪŻ
Hś“ļŖ┬Ę╩Ūė├ė▓╝■Ą─ĘĮĘ©įO(sh©©)ėŗę╗éĆļŖ┬ĘŻ¼╦³┐╔ęįĮŌøQŪ░├µā╔éĆå¢Ņ}ĪŻČ°Ą┌╚²éĆå¢Ņ}╦┘Č╚Ą─š{(di©żo)╣Ø(ji©”)ät╩Ū═©▀^▄ø╝■Ą─ĘĮĘ©Ż¼└¹ė├å╬Ų¼ÖC(j©®)I/O┐┌╔·«a(ch©Żn)PWM▓©ą┼╠¢╝ėęįīŹ(sh©¬)¼F(xi©żn)ĪŻ
▀@ę╗╣Ø(ji©”)╬ęéāų„ę¬ĮķĮBHś“ļŖ┬ĘŻ¼║¾├µĄ─š┬╣Ø(ji©”)╬ęéāĢ■īŻķTĮķĮBĄĮPWMš{(di©żo)╦┘å¢Ņ}ĪŻ
3ĪóHś“ļŖ┬Ę
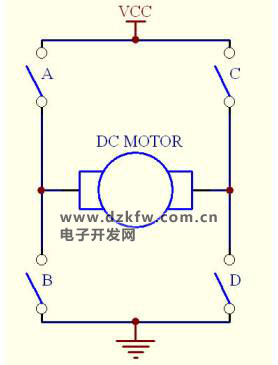
ļŖÖC(j©®)ū÷║├║¾║¾ę²│÷ā╔éĆśOŻ¼╚ńłD5╦∙╩ŠŻ¼Įoā╔éĆśO─▄ļŖŠ═─▄ē“?q©▒)Ź¼F(xi©żn)Ųõ▐D(zhu©Żn)äėŻ¼Č°Ė─ūāŲõļŖį┤śOąįäé┐╔ęįīŹ(sh©¬)¼F(xi©żn)ōQŽ“ĪŻ

łD5 £p╦┘ļŖÖC(j©®)╝░ļŖ┬ĘłD
Ū░├µ╬ęéāšf▀^▒žĒÜę¬ĮŌøQ“ī(q©▒)äė┴”▓╗ūŃ║═ōQŽ“å¢Ņ}Ż¼įO(sh©©)ėŗę╗░ŃĢ■▓╔ė├ā╔ĘNĘĮĘ©Ż¼ę╗╩ŪįO(sh©©)ėŗė╔Ęųļxį¬╝■ĮM│╔Ą─“ī(q©▒)äėļŖ┬ĘīŹ(sh©¬)¼F(xi©żn)Ż¼┴Ēę╗ĘNĘĮĘ©ät╩Ū▓╔ė├īŻė├Ą─“ī(q©▒)äėąŠŲ¼╝ėęįīŹ(sh©¬)¼F(xi©żn)ĪŻė╔ė┌īŻė├Ą─“ī(q©▒)äėąŠŲ¼ė╔ė┌ĮY(ji©”)śŗ(g©░u)║åå╬ĪóārĖ±▒Ńę╦Īó┐╔┐┐ąįĖ▀Ą╚╠ž³c(di©Żn)Ż¼ę“Č°▒╗ÅVĘ║Ą─æ¬(y©®ng)ė├īŹ(sh©¬)¼F(xi©żn)ļŖÖC(j©®)Ą─“ī(q©▒)äėĪŻļŖÖC(j©®)Ą─“ī(q©▒)äėąŠŲ¼║▄ČÓ╚ńL298NĪóBST7970ĪóMC33886Ą╚Ż¼▀@└’╬ęéāĮķĮBųŪ─▄ÖC(j©®)Ų„╚╦ųą▒╚▌^│Żė├Ą─LM298N“ī(q©▒)äė─ŻēKŻ¼BST7970ĪóMC33886ę╗░Ńį┌ļŖÖC(j©®)╣”┬╩▒╚▌^┤¾Ą─ł÷║Ž▀mė├ĪŻį┌ĮķĮBLM298N“ī(q©▒)äė─ŻēKų«Ū░Ż¼╬ęéāŽ╚ĮķĮBę╗Ž┬Hś“ļŖ┬ĘŻ¼ąĶ꬚f├„Ą─╩ŪĢrŻ¼į┌Ž┬├µĄ─ļŖ┬Ęė╔ė┌ā╚(n©©i)▓┐▓╔ė├┴╦╚²śO╣▄Ż¼╚²śO╣▄▒Š╔ĒŲĄĮĘ┼┤¾Ą─ū„ė├Ż¼╝┤į÷┤¾┴╦“ī(q©▒)äėļŖ┴„Ż¼╦∙ęįį┌Ž┬├µĄ─ųvĮŌųą╬ęéāų„ę¬é╚(c©©)ųžųvĮŌ╚ń║╬īŹ(sh©¬)¼F(xi©żn)ōQŽ“╣”─▄ĪŻ
Hś“ļŖ┬Ę┐╔ęįė├╚ńłD6üĒ▒Ē╩ŠŲõįŁ└ĒŻ║
łD6 Hś“║åå╬ļŖ┬Ę
Å─łDųą┐╔ęį┐┤│÷Ż¼Ųõą╬ĀŅŅÉ╦Ųė┌ūų─ĖĪ░HĪ▒,ū„×ķžō(f©┤)▌dĄ─ų▒┴„ļŖÖC(j©®)Ž±Ī░ś“Ī▒ę╗śė╝▄į┌╔Ž├µŻ¼╦∙ęįĘQ×ķĪ░Hś““ī(q©▒)äėĪ▒Ż¼4éĆķ_ĻP(gu©Īn)╦∙į┌Ą─╬╗ų├Š═ĘQ×ķĪ░ś“▒█Ī▒ĪŻ
Å─łDųą┐╔ęį┐┤│÷Ż¼╝┘įO(sh©©)ķ_ĻP(gu©Īn)AĪóDĮė═©Ż¼ļŖÖC(j©®)š²Ž“▐D(zhu©Żn)äėŻ¼Č°ķ_ĻP(gu©Īn)BĪóCĮė═©ĢrŻ¼ų▒┴„ļŖÖC(j©®)īóĘ┤Ž“▐D(zhu©Żn)äėŻ¼Å─Č°īŹ(sh©¬)¼F(xi©żn)┴╦ļŖÖC(j©®)Ą─š²Ę┤┐žųŲĪŻ«ö(d©Īng)╚╗īŹ(sh©¬)ļHæ¬(y©®ng)ė├ųą╬ęéā▀Ć┐╔ęįĄ├ĄĮŲõ╦³ā╔ĘNĀŅæB(t©żi):
1Ż®äx▄ćŻ¼╝┤īóAĪóC╗“BĪóDĮė═©Ż¼ätļŖÖC(j©®)æTąį▐D(zhu©Żn)äė«a(ch©Żn)╔·Ą─ļŖäėä▌īó▒╗Č╠┬ĘŻ¼ą╬│╔ūĶĄK▀\(y©┤n)äėĄ─Ėąæ¬(y©®ng)ļŖ┴„Ż¼ķ_│╔Ī░äx▄ćĪ▒ū„ė├ĪŻ
2Ż®ČĶąąŻ¼4éĆķ_ĻP(gu©Īn)╚½▓┐öÓķ_Ż¼ätļŖÖC(j©®)æTąį╦∙«a(ch©Żn)╔·Ą─ļŖäėä▌īó¤oĘ©ķ_│╔ļŖ┬ĘŻ¼Å─Č°ę▓Š═▓╗Ģ■«a(ch©Żn)╔·ūĶĄK▀\(y©┤n)äėĄ─Ėąæ¬(y©®ng)ļŖ┴„Ż¼ļŖÖC(j©®)īóæTąį▐D(zhu©Żn)äė▌^ķLĢrķgĪŻ
ęį╔ŽļŖ┬Ęų╗╩Ūšf├„Ą─įŁ└ĒŻ¼īŹ(sh©¬)ļHļŖ┬Ęųą╬ęéā═©│ŻīóüĒ╦─éĆķ_ĻP(gu©Īn)ōQ│╔╚²śO╣▄ĪŻ╚ńłD7╦∙╩ŠŻ¼Hś“╩ĮļŖÖC(j©®)“ī(q©▒)äėļŖ┬Ę░³└©4éĆ╚²śO╣▄║═ę╗éĆļŖÖC(j©®)ĪŻę¬╩╣ļŖÖC(j©®)▀\(y©┤n)▐D(zhu©Żn)Ż¼▒žĒÜī¦(d©Żo)═©ī”ĮŪŠĆ╔ŽĄ─ę╗ī”╚²śO╣▄ĪŻĖ∙ō■(j©┤)▓╗═¼╚²śO╣▄ī”Ą─ī¦(d©Żo)═©ŪķørŻ¼ļŖ┴„┐╔─▄Ģ■Å─ū¾ų┴ėę╗“Å─ėęų┴ū¾┴„▀^ļŖÖC(j©®)Ż¼Å─Č°┐žųŲļŖÖC(j©®)Ą─▐D(zhu©Żn)Ž“ĪŻė╔ė┌Hś“ļŖ┬Ę┐╔ęį║▄ĘĮ▒ŃĄ─īŹ(sh©¬)¼F(xi©żn)ļŖÖC(j©®)Ą─š²Ę┤▐D(zhu©Żn)Ą─“ī(q©▒)äėę“Č°Ą├ĄĮ┴╦ÅVĘ║æ¬(y©®ng)ė├ĪŻ
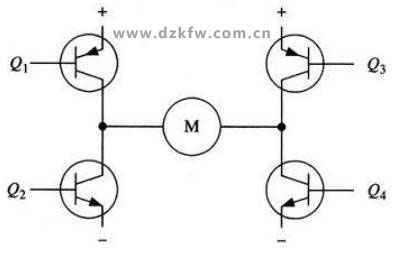
łD7 Ąõą═Ą─Hś“ļŖ┬Ę
ę¬╩╣ļŖÖC(j©®)▀\(y©┤n)▐D(zhu©Żn)Ż¼▒žĒÜ╩╣ī”ĮŪŠĆ╔ŽĄ─ę╗ī”╚²śO╣▄ī¦(d©Żo)═©ĪŻ└²╚ńŻ¼╚ńłDłD8╦∙╩ŠŻ¼«ö(d©Īng)Q1╣▄║═Q4╣▄ī¦(d©Żo)═©ĢrŻ¼ļŖ┴„Š═Å─ļŖį┤š²śOĮø(j©®ng)Q1Å─ū¾ų┴ėę┤®▀^ļŖÖC(j©®)Ż¼╚╗║¾į┘Įø(j©®ng)Q4╗žĄĮļŖį┤žō(f©┤)śOĪŻ░┤łDųąļŖ┴„╝²Ņ^╦∙╩ŠŻ¼įō┴„Ž“Ą─ļŖ┴„īó“ī(q©▒)äėļŖÖC(j©®)ĒśĢrßś▐D(zhu©Żn)äėĪŻ«ö(d©Īng)╚²śO╣▄Q1║═Q4ī¦(d©Żo)═©ĢrŻ¼ļŖ┴„īóÅ─ū¾ų┴ėę┴„▀^ļŖÖC(j©®)Ż¼Å─Č°“ī(q©▒)äėļŖÖC(j©®)░┤╠žČ©Ą─ĘĮŽ“▐D(zhu©Żn)äėĪŻ
łD9╦∙╩Š×ķ┴Ēę╗ī”╚²śO╣▄Q2║═Q3ī¦(d©Żo)═©Ą─ŪķørŻ¼ļŖ┴„Å─ėęų┴ū¾┴„▀^ļŖÖC(j©®)ĪŻ«ö(d©Īng)╚²śO╣▄Q2║═Q3ī¦(d©Żo)═©ĢrŻ¼ļŖ┴„īóÅ─ėęų┴ū¾┴„▀^ļŖÖC(j©®)Ż¼Å─Č°“ī(q©▒)äėļŖÖC(j©®)čž┴Ēę╗ĘĮŽ“▐D(zhu©Żn)äėĪŻ
▀@└’ąĶę¬ūóęŌĄ─╩ŪŻ¼ļŖÖC(j©®)ę╗░ŃĢ■ę²│÷ā╔éĆśOŻ¼Ą½▓ó¤oš²žō(f©┤)ų«ĘųŻ¼╦∙ų^Ą─š²Ę┤▐D(zhu©Żn)ę▓ų╗╩Ū╬ęéā?n©©i)╦×ķČ©┴xŻ¼Š▀¾wę¬┐┤īŹ(sh©¬)ļHĄ─æ¬(y©®ng)ė├║═░▓čbŪķørĪŻ

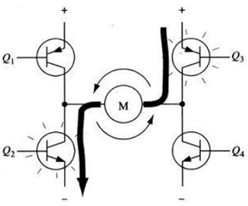
łD8 ļŖÖC(j©®)š²▐D(zhu©Żn) łD9 ļŖÖC(j©®)Ę┤▐D(zhu©Żn)
“ī(q©▒)äėļŖÖC(j©®)ĢrŻ¼▒ŻūCHś“╔Žā╔éĆ═¼é╚(c©©)Ą─╚²śO╣▄▓╗Ģ■═¼Ģrī¦(d©Żo)═©ĘŪ│Żųžę¬Ż¼╚ń╣¹╚²śO╣▄Q1║═Q2═¼Ģrī¦(d©Żo)═©Ż¼─Ū├┤ļŖ┴„Š═Ģ■Å─š²śO┤®▀^ā╔éĆ╚²śO╣▄ų▒Įė╗žĄĮžō(f©┤)śOŻ¼┤╦ĢrļŖ┬Ęųą│²┴╦╚²śO╣▄═Ōø]ėąŲõ╦³╚╬║╬žō(f©┤)▌dŻ¼ę“┤╦ļŖ┬Ę╔ŽĄ─ļŖ┴„Š═┐╔─▄▀_(d©ó)ĄĮūŅ┤¾ųĄŻ©įōļŖ┴„āH╩▄ļŖį┤ąį─▄Ž▐ųŲŻ®Ż¼╔§ų┴¤²ē─╚²śO╣▄ĪŻ╗∙ė┌╔Ž╩÷įŁę“Ż¼į┌īŹ(sh©¬)ļH“ī(q©▒)äėļŖ┬Ęųą═©│Żę¬ė├ė▓╝■ļŖ┬ĘĘĮ▒ŃĄž┐žųŲ╚²śO╣▄Ą─ķ_ĻP(gu©Īn)ĪŻ
łD10╦∙╩ŠŠ═╩Ū╗∙ė┌▀@ĘN┐╝æ]Ą─Ė─▀M(j©¼n)ļŖ┬ĘŻ¼╦³į┌╗∙▒ŠĄ─Hś“ļŖ┬ĘĄ─╗∙ĄA(ch©│)╔Žį÷╝ė┴╦4éĆ┼cķT║═2éĆĘŪķTĪŻ4éĆ┼cķT═¼ę╗éĆ╩╣─▄ī¦(d©Żo)═©ą┼╠¢ŽÓĮėŻ¼▀@śėŻ¼ė├▀@ę╗éĆą┼╠¢Š═─▄┐žųŲš¹éĆļŖ┬ĘĄ─ķ_ĻP(gu©Īn)ĪŻČ°2éĆĘŪķT═©▀^╠ß╣®ę╗ĘNĘĮŽ“▌ö╚ļŻ¼┐╔ęį▒ŻūC╚╬║╬Ģr║“į┌Hś“Ą─═¼é╚(c©©)Č╝ų╗ėąę╗éĆ╚²śO╣▄ī¦(d©Żo)═©ĪŻ
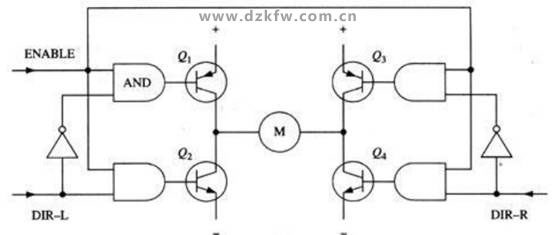
łD10 Ė─▀M(j©¼n)║¾Ą─Hś““ī(q©▒)äėļŖ┬Ę
▓╔ė├ęį╔ŽĘĮĘ©Ż¼ļŖÖC(j©®)Ą─▀\(y©┤n)▐D(zhu©Żn)ų╗ąĶę¬╚²éĆą┼╠¢┐žųŲŻ¼╚ńłD11Ż║ā╔éĆĘĮŽ“ą┼╠¢║═ę╗éĆ╩╣─▄ą┼╠¢ĪŻ╚ń╣¹DIRŻŁLą┼╠¢×ķ0Ż¼DIRŻŁRą┼╠¢×ķ1Ż¼▓óŪę╩╣─▄ą┼╠¢╩Ū1Ż¼─Ū├┤╚²śO╣▄Q1║═Q4ī¦(d©Żo)═©Ż¼ļŖ┴„Å─ū¾ų┴ėę┴„Įø(j©®ng)ļŖÖC(j©®)Ż¼╚ńłD6 ╦∙╩ŠŻ╗╚ń╣¹DIRŻŁLą┼╠¢ūā?y©Łu)?Ż¼Č°DIRŻŁRą┼╠¢ūā?y©Łu)?ĪŻ─Ū├┤Q2║═Q3īóī¦(d©Żo)═©Ż¼ļŖ┴„ätĘ┤Ž“┴„▀^ļŖÖC(j©®)ĪŻ
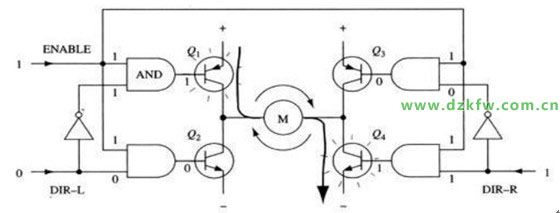
łD11 “ī(q©▒)äėļŖÖC(j©®)▐D(zhu©Żn)äėĢrĄ─ą┼╠¢╩ŠęŌłD
4Īó“ī(q©▒)äėąŠŲ¼▀xō±Ģr┐╝æ]Ą─å¢Ņ}
Hś“ļŖ┬Ęļm╚╗ėąų°įSČÓĄ─ā×(y©Łu)³c(di©Żn)Ż¼Ą½╩Ūį┌īŹ(sh©¬)ļHĄ─ųŲū„▀^│╠ųąŻ¼ė╔ė┌į¬╝■▌^ČÓŻ¼ļŖ┬Ę║═┤ŅĮ©ę▓▌^×ķ┬ķ¤®Ż¼į÷╝ė┴╦ė▓╝■įO(sh©©)ėŗĄ─Å═(f©┤)ļsČ╚ĪŻ╦∙Į^┤¾ČÓöĄ(sh©┤)ųŲū„ųą═©│Żų▒Įė▀xė├īŻė├Ą─“ī(q©▒)äėąŠŲ¼ĪŻ─┐Ū░╩ą├µ╔ŽīŻė├Ą─“ī(q©▒)äėąŠŲ¼║▄ČÓŻ¼╚ń╔Ž├µ╠ߥĮĄ─L298NĪóBST7970ĪóMC33886Ą╚Ż¼Ą½ĄĮĄū╬ęéāæ¬(y©®ng)įō▀xė├──į█ąŠŲ¼─žŻ¼«ö(d©Īng)╚╗├┐ĘNąŠŲ¼ėąūį╝║Ą─ā×(y©Łu)ä▌Ż¼╬ęéāæ¬(y©®ng)įōĖ∙ō■(j©┤)įO(sh©©)ėŗąĶę¬Å─ārĖ±║═ąį─▄╔ŽŠC║Ž┐╝æ]▓┼ąąŻ¼▀@└’šä╚²éĆĘĮ├µĪŻ
1Ż®“ī(q©▒)äėą¦┬╩Ą─▐D(zhu©Żn)╗»
╦∙ų^“ī(q©▒)äėą¦┬╩Ė▀Ż¼Š═╩Ūę¬īó▌ö╚ļĄ──▄┴┐▒M┴┐ČÓĄ─▌ö│÷Įožō(f©┤)▌dŻ¼Č°“ī(q©▒)äėļŖ┬Ę▒Š╔ĒūŅ║├▓╗Ž¹║─╗“╔┘Ž¹║──▄┴┐Ż¼Š▀¾wĄĮHś“╔ŽŻ¼ę▓Š═╩Ū4éĆś“▒█į┌ī¦(d©Żo)═©ĢrūŅ║├ø]ėąē║ĮĄŻ¼įĮąĪįĮ║├ĪŻÅ─ļŖ┬Ę╔Ž┐┤Ż¼▀@ų„ę¬╚ĪøQė┌Ī░ķ_ĻP(gu©Īn)Ī▒╔ŽĄ─ē║ĮĄŻ¼ŲõŽ¹║─×ķ┴„▀^Ą─ļŖ┴„│╦ęįē║ĮĄŻ¼ļŖ┴„┤¾ąĪų„ę¬╚ĪøQė┌žō(f©┤)▌dļŖÖC(j©®)Ą─ąĶ꬯¼╦∙ęįī”ė┌įO(sh©©)ėŗüĒšfųž³c(di©Żn)æ¬(y©®ng)┐╝æ]▒M┴┐£pąĪķ_ĻP(gu©Īn)╔ŽĄ─ļŖūĶÅ─Č°╠ßĖ▀ą¦┬╩Ż¼Č°į┌▀xė├“ī(q©▒)äėąŠŲ¼Ģræ¬(y©®ng)«ö(d©Īng)┐╝æ]╦∙▀xė├Ą─ąŠŲ¼ē║ĮĄ╩ŪʱØMūŃļŖÖC(j©®)“ī(q©▒)äė┴”Ą─ąĶ꬯¼Ž±ģó╝ė▀^’w╦╝┐©Ā¢ųŪ─▄▄ćĄ─┼¾ėčæ¬(y©®ng)įōŪÕ│■Ż¼ę╗░Ń║▄╔┘ėą╚╦▀xō±L298NąŠŲ¼Ą─Ż¼Š┐ŲõįŁę“Š═╩Ū298NĄ─ūį╔Ēē║ĮĄ╠½┤¾įņ│╔╣”┬╩Ž¹║─╠½┤¾Č°▓╗ØMūŃļŖÖC(j©®)“ī(q©▒)äėąĶę¬įņ│╔Ą─ĪŻ
2Ż®─▄ē“═©▀^Ą─“ī(q©▒)äėļŖ┴„
├┐éĆąŠŲ¼Č╝ėąūį╔Ē│ą╩▄Ą─ūŅ┤¾ļŖ┴„Ż¼į┌įO(sh©©)ėŗĢræ¬(y©®ng)▒ŻūCļŖÖC(j©®)Ą─╣żū„ļŖ┴„▓╗Ģ■įņ│╔ąŠŲ¼Ą─¤²Ü¦Ż¼Ž±ųŪ─▄▄ćųŲū„▀^│╠ųąŻ¼ļŖÖC(j©®)Ą─ļŖ┴„┐╔ęį▀_(d©ó)ĄĮ4ŻŁ5AŻ¼Č°L298ūŅ┤¾│ą╩▄Ą─ļŖ┴„▓╗─▄│¼▀^2AŻ¼╦∙ęį▀@ę▓╩Ūę╗░Ń▓╗▓╔ė├298Nū„×ķ“ī(q©▒)äėąŠŲ¼Ą─┴Ēę╗éĆįŁę“ĪŻ
3Ż®ąŠŲ¼Ą─ārĖ±
ī”ė┌Ų„╝■Ą─ārĖ±Ż¼ę╗░Ńį┌śI(y©©)ėÓĄ─ųŲū„╗∙▒Š▓╗Ģ■┐╝æ]╠½ČÓŻ¼Ą½šµš²į┌«a(ch©Żn)ŲĘĄ─įO(sh©©)ėŗųąŻ¼ārĖ±ģs╩Ū│²┴╦ąį─▄═Ō▒žĒÜ┐╝æ]Ą─┴Ēę╗éĆĻP(gu©Īn)µIę“╦žŻ¼Ž±äéäé╔Ž├µ╠ߥĮ┴╦L298Nė╔ė┌ūį╔Ēē║ĮĄ╠½┤¾Ż¼╦∙│ą╩▄Ą─ļŖ┴„╠½╔┘Ż¼╦∙ęį▓╗ØMūŃųŪ─▄▄ćļŖÖC(j©®)Ą─ąĶ꬯¼╦∙ęįėąĄ─┼¾ėčĢ■šfŻ¼298NąŠŲ¼▓╗║├Ż¼▓╗─▄šf▓╗║├Ż¼ę¬ų¬Ą└Å─ārĖ±╔Ž7970╩Ū298Ą─3▒Čų«ČÓŻ¼Ž±ū÷ę╗░Ń╦┘Č╚▒╚▌^Ą═Ą─ÖC(j©®)Ų„╚╦Ż¼298ąŠŲ¼═Ļ╚½─▄ē“ØMūŃę¬Ū¾ĪŻ
ŠC╔Ž╦∙╩÷Ż¼į┌▀xō±“ī(q©▒)äėąŠŲ¼æ¬(y©®ng)Å─ārĖ±Īó“ī(q©▒)äėļŖ┴„╝░ē║ĮĄĄ╚ĘĮ├µĮo║Ž┐╝æ]ĪŻ
5ĪóL298ąŠŲ¼╝░“ī(q©▒)äė─ŻēK
L298Nā╚(n©©i)▓┐Ą─ĮM│╔ŲõŠ═╩Ū╔Ž├µųvĄ─Hś““ī(q©▒)äėļŖ┬ĘŻ¼╦∙ęį╣żū„įŁ└Ē╬ęęį╔ŽĮķĮBĄ─Hś“ŽÓ═¼Ż¼▀@└’╬ęéā▓╗į┌öó╩÷Ż¼į┌╩╣ė├Ģrųž³c(di©Żn)ę¬┴╦ĮŌŲõę²─_Ą─╣”─▄║═ų„ꬥ─ąį─▄ģóöĄ(sh©┤)ĪŻę²─_łD╚ńłD12╦∙╩ŠĪŻ
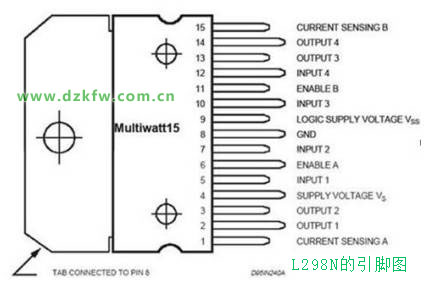
łD12 L298NĄ─ę²─_łD
L298N╩ŪST╣½╦Š╔·«a(ch©Żn)Ą─ę╗ĘNĖ▀ļŖē║Ż¼┤¾ļŖ┴„Ą─ļŖÖC(j©®)“ī(q©▒)äėąŠŲ¼ĪŻįōąŠŲ¼▓╔ė├15─_ĘŌčbĪŻų„ę¬╠ž³c(di©Żn)╩ŪŻ║╣żū„ļŖē║Ė▀Ż¼ūŅĖ▀╣żū„ļŖē║┐╔▀_(d©ó)46VŻ¼▌ö│÷ļŖ┴„┤¾Ż¼╦▓ķgĘÕųĄ┐╔▀_(d©ó)3AŻ¼│ų└m(x©┤)╣żū„ļŖ┴„×ķ2AŻ╗Ņ~Č©╣”┬╩×ķ25WĪŻā╚(n©©i)║¼ā╔éĆHś“Ą─Ė▀ļŖē║┤¾ļŖ┴„╚½ś“╩Į“ī(q©▒)äėŲ„Ż¼┐╔ęįė├üĒ“ī(q©▒)äėų▒┴„ļŖÖC(j©®)║═▓Į▀M(j©¼n)ļŖÖC(j©®)Īó└^ļŖŲ„ŠĆ╚”Ą╚Ėąąįžō(f©┤)▌dŻ╗▓╔ė├ś╦(bi©Īo)£╩(zh©│n)▀ē▌ŗļŖŲĮą┼╠¢┐žųŲŻ╗Š▀ėąā╔éĆė├┐žųŲČ╦Ż¼į┌▓╗╩▄▌ö╚ļą┼╠¢ė░ĒæĄ─ŪķørŽ┬į╩įS╗“Į¹ų╣Ų„╝■╣żū„ėąę╗éĆ▀ē▌ŗļŖį┤▌ö╚ļČ╦Ż¼╩╣ā╚(n©©i)▓┐▀ē▌ŗļŖ┬Ę▓┐Ęųį┌Ą═ļŖē║Ž┬╣żū„Ż╗┐╔ęį═ŌĮėÖz£yļŖūĶŻ¼īóūā╗»┴┐Ę┤üĮo┐žųŲļŖ┬ĘĪŻ╩╣ė├L298NąŠŲ¼“ī(q©▒)äėļŖÖC(j©®)Ż¼įōąŠŲ¼┐╔ęį“ī(q©▒)äėę╗┼_ā╔ŽÓ▓Į▀M(j©¼n)ļŖÖC(j©®)║═╦─ŽÓ▓Į▀M(j©¼n)ļŖÖC(j©®)Ż¼ę▓┐╔ęįā╔┼_ų▒┴„ļŖÖC(j©®)ĪŻL298N─ŻēKĄ─“ī(q©▒)äėļŖ┬ĘłD╚ńłD13╦∙╩ŠĪŻ
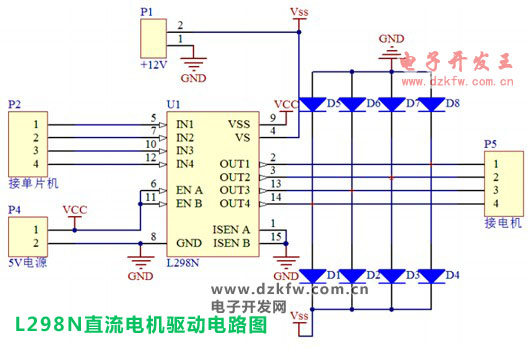
łD13 L298NļŖ┬ĘłD
ī”ė┌ęį╔ŽļŖ┬ĘłDėąęįŽ┬Äū³c(di©Żn)šf├„Ż║
1Ż®ļŖ┬ĘłDųąėąā╔éĆļŖ┴„Ż¼ę╗┬Ę×ķL298╣żū„ąĶꬥ─5VļŖį┤VCCŻ¼ę╗┬Ę×ķ“ī(q©▒)äėļŖÖC(j©®)ė├Ą─ļŖ│žļŖį┤VSSĪŻ
2Ż®1─_║═15─_ėąĄ─ļŖ┬Ęį┌ųąķg┤«Įė┴╦┤¾╣”┬╩Ą─ļŖūĶŻ¼┐╔ęį▓╗╝ė
3Ż®░╦éĆ└m(x©┤)┴„Č■śO╣▄╩Ū×ķ┴╦Ž¹│²ļŖÖC(j©®)▐D(zhu©Żn)äėĢrĄ─╝ŌĘÕļŖē║▒Żūo(h©┤)ļŖÖC(j©®)Č°įO(sh©©)ėŗŻ¼║å╗»ļŖ┬Ę┐╔ęį▓╗╝ėĪŻ
4Ż®6─_║═11─_×ķā╔┬ĘļŖÖC(j©®)═©Ą└Ą─╩╣─▄ķ_ĻP(gu©Īn)Ż¼Ė▀ļŖŲĮ╩╣─▄╦∙ęį┐╔ęįų▒ĮėĮėĖ▀ļŖŲĮŻ¼ę▓┐╔ęįĮ╗ė╔å╬Ų¼ÖC(j©®)┐žųŲĪŻ
5Ż®ė╔ė┌╣żū„ĢrL298Ą─╣”┬╩▌^┤¾Ż¼┐╔ęį▀m«ö(d©Īng)╝ėčb╔ó¤ßŲ¼ĪŻ
L298─ŻēKĄ─Ą─═Ōą╬łD╚ńłD14╦∙╩ŠŻ║
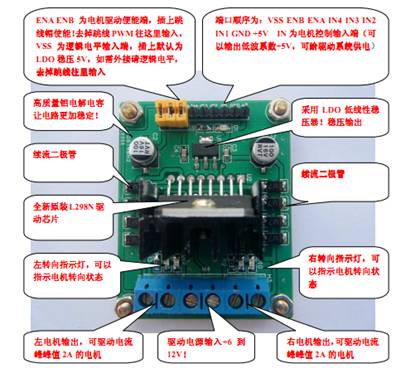
łD14 L298N─ŻēK═Ōą╬łD
6ĪóļŖÖC(j©®)š²Ę┤▐D(zhu©Żn)│╠ą“
Ž┬├µīæę╗éĆ│╠ą“ūīąĪ▄ć╔Žę╗éĆļŖÖC(j©®)š²▐D(zhu©Żn)ĪŻ
#include<reg52.h>
#define uint unsigned int
#define uchar unsigned char
sbit PWM1=P2^0;//ĮėIN1 ┐žųŲš²▐D(zhu©Żn)
sbit PWM2=P2^1;//ĮėIN2 ┐žųŲĘ┤▐D(zhu©Żn)
void main()
{
while(1)
{
PWM1=1;
PWM2=0;
}
}
Ž┬├µīæę╗éĆ│╠ą“ūīąĪ▄ć╔Žā╔éĆéĆļŖÖC(j©®)š²▐D(zhu©Żn)Ż¼īŹ(sh©¬)¼F(xi©żn)ąĪ▄ćĄ─Ū░ąąĪŻ
#include<reg52.h>
#define uint unsigned int
#define uchar unsigned char
sbit PWM1=P2^0;//ĮėIN1 ┐žųŲš²▐D(zhu©Żn)
sbit PWM2=P2^1;//ĮėIN2 ┐žųŲĘ┤▐D(zhu©Żn)
sbit PWM3=P2^2;//ĮėIN1 ┐žųŲš²▐D(zhu©Żn)
sbit PWM4=P2^3;//ĮėIN2 ┐žųŲĘ┤▐D(zhu©Żn)
sbit PWM5=P2^4;//ĮėIN1 ┐žųŲš²▐D(zhu©Żn)
sbit PWM6=P2^5;//ĮėIN2 ┐žųŲĘ┤▐D(zhu©Żn)
sbit PWM7=P2^6;//ĮėIN1 ┐žųŲš²▐D(zhu©Żn)
sbit PWM8=P2^7;//ĮėIN2 ┐žųŲĘ┤▐D(zhu©Żn)
void main()
{
while(1)
{
PWM1=1;
PWM2=0;
PWM3=1;
PWM4=0;
PWM5=1;
PWM6=0;
PWM7=1;
PWM8=0;
}
}
void delay(uint z)
{
uint x,y;
for(x=z;x>0;x--)
for(y=500;y>0;y--);
}
7ĪóļpļŖÖC(j©®)▓Ņ╦┘▐D(zhu©Żn)Ž“Ą─įŁ└Ē
ZN-1AųŪ─▄ąĪ▄ćėąā╔ĘN▐D(zhu©Żn)Ž“Ą─ĘĮ╩ĮŻ¼▓Ņ╦┘▐D(zhu©Żn)Ž“║═ȵÖC(j©®)▐D(zhu©Żn)Ž“ĪŻė╔ė┌▓Ņ╦┘▐D(zhu©Żn)Ž“─┐Ū░╩ą├µ╔ŽĄ─┘Y┴Ž║═ŽÓĻP(gu©Īn)│╠ą“▒╚▌^ČÓŻ¼╦∙ęį▒ŠĮ╠│╠Į^┤¾▓┐Ęų│╠ą“▓╔ė├║¾▌å“ī(q©▒)äėŻ¼Ū░▌åȵÖC(j©®)īŹ(sh©¬)¼F(xi©żn)▐D(zhu©Żn)Ž“Ą─┐žųŲĘĮ╩ĮĪŻ▀@└’║åę¬ĮķĮBę╗Ž┬▓Ņ╦┘▐D(zhu©Żn)Ž“Ą─įŁ└Ē╝░ĘĮĘ©Ż¼▓óĮo│÷ę╗éĆ║åå╬Ą─│╠ą“Ż¼Ė³Å═(f©┤)ļsĄ─│╠ą“šł┤¾╝ęģó┐╝ŽÓĻP(gu©Īn)Ą─┘Y┴ŽŻ¼╚ń┐╔ęį└¹ė├ZN-1AųŪ─▄ąĪ▄ćīŹ(sh©¬)¼F(xi©żn)ąĪ▄ćĄ─ų▒┴ó▀\(y©┤n)äėŻ¼╝┤ā╔▌åų▒┴óŪ░ąąŻ¼─┐Ū░╩└Įń╔Ž▒╚▌^’L(f©źng)ąąĄ─ā╔▌åų▒┤·▓Į▄ćŠ═╩Ū└¹ė├▀@ĘNą╬╩ĮīŹ(sh©¬)¼F(xi©żn)Ż¼▓╗▀^ę¬ę¬ū÷ā╔▌åų▒┴óĢr╔µ╝░ĄĮŲĮ║ŌĄ─å¢Ņ}Ż¼ąĶī”╝ė╦┘Č╚ėŗ║══ė┬▌āxĄ─ų¬Ą└ėą╦∙┴╦ĮŌŻ¼ėą┼d╚ż ┼¾ėč┐╔ęį└¹ė├▒ŠąĪ▄ćīŹ(sh©¬)¼F(xi©żn)ų▒┴óĄ─╣”─▄Ż¼▀@└’▓╗ČÓū„ĮķĮBĪŻ
╦∙ų^Ą─▓Ņ╦┘Ż¼╩ŪųĖū¾ėęā╔▄ć▌åĄ─╦┘Č╚▓ŅŻ¼╝┘╚ńū¾▀ģ▄ć▌å▒╚ėę▀ģĄ─┐ņŻ¼ätąĪ▄ćĢ■Ų½Ž“ėęĪŻ═¼ĢrŻ¼ū¾Ą─Ą─▄ć▌å▐D(zhu©Żn)╦┘▒╚ėęĄ─┬²Ż¼─Ū├┤ąĪ▄ćĢ■Ž“ū¾▀ģ▐D(zhu©Żn)äėĪŻ─┐Ū░ų„ę¬ėąęįŽ┬ā╔ĘNĘĮ╩ĮĪŻ
Ż©1Ż®ąĪ▄掓ū¾▐D(zhu©Żn)Ż¼┐╔╩Ū╩Ūū¾▌å═Żų╣Ż¼ū¾▌å└^└m(x©┤)▐D(zhu©Żn)äėŻ¼▀@śė┐╔īŹ(sh©¬)¼F(xi©żn)ū¾▐D(zhu©Żn)Ż¼▀@ĘNĘĮ╩ĮīŹ(sh©¬)¼F(xi©żn)ąĪĮŪČ╚Ą─▐D(zhu©Żn)ÅØŻ¼į┌ĮŪČ╚▓╗┤¾Ģr┐╔▓╔ė├┤╦ĘNĘĮ╩ĮĪŻ
Ż©2Ż®ąĪ▄掓ū¾▐D(zhu©Żn)Ż¼┐╔ęį╩Ūū¾▌åĘ┤▐D(zhu©Żn)Ż¼ėę▌åš²▐D(zhu©Żn)Ż¼▀@śė┐╔ęįīŹ(sh©¬)¼F(xi©żn)┤¾ĮŪČ╚Ą─ū¾▐D(zhu©Żn)Ż¼╔§ų┴┐╔ęį▀M(j©¼n)ąąįŁĄž┤“▐D(zhu©Żn)ĪŻ
═¼└Ē┐╔═Ų│÷ąĪ▄ć╚ń║╬Ž“ėę▐D(zhu©Żn)Ž“ĪŻ
Ž┬├µĮo│÷ę╗éĆ└¹ė├║¾▌åļŖÖC(j©®)▓Ņ╩┬▀\(y©┤n)äėīŹ(sh©¬)¼F(xi©żn)ąĪ▄ćįŁĄž┤“▐D(zhu©Żn)Ą─│╠ą“ĪŻ
8Īó└¹ė├▓Ņ╦┘īŹ(sh©¬)¼F(xi©żn)ąĪįŁįŁĄž┤“▐D(zhu©Żn)│╠ą“
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū